NUORODOS
1. Popovas E.V. Realaus laiko ekspertų sistemos [ Elektroninis šaltinis] // atviros sistemos- 1995. - Nr. 2. - Elektronas. Danas. - Prieigos režimas: http://www.osp.ru/text/302/178608/
2. Crossland R., Sims W.J.H., McMahon C.A. Objektinis modeliavimo sistema, skirta ankstyvojo varianto dizaino neapibrėžtumui parodyti. // Inžinerinio projektavimo tyrimai - 2003. - № 14. -С. 173-183.
3. Orientacinė grafika ARIES [elektroninis išteklius] – elektronas. Danas. – 2006. – Prieigos režimas: http://www.geographix.com/ps/vi-ewpg.aspx?navigation_id=1273
4. Schlumberger Merak [Elektroninis išteklius] – elektronas. Danas. -2006 m. – Prieigos režimas: http://www.slb.com/content/servi-ces/software/valuerisk/index.asp
5. Gensim G2 [Elektroninis išteklius] – Electron. Danas. – 2006. – Prieigos režimas: – http://www.gensym.com/?p=what_it_is_g2
6. Thurston D.L., Liu T. Kelių atributų projektinis įvertinimas
der Uncertainty // Sistemų automatizavimas: tyrimai ir taikymas.
1991. - V. 1. - Nr. 2. - P. 93-102.
7. Paredis C.J.J., Diaz-Calderon A., Sinha R., Khosla P.K. Sukomponuojami modeliai, skirti modeliavimui pagrįsti projektavimui // Inžinerija su kompiuteriais. - 2001. - Nr 17. - P. 112-128.
8. Silich M.P. Sistemos technologija: į objektą orientuotas metodas. - Tomskas: Tomas. valstybė Valdymo sistemų ir radioelektronikos universitetas, 2002. - 224 p.
9. Silich M.P., Starodubtsev GV. Investicinės plėtros projektų atrankos objektinis modelis naftos ir dujų telkiniai. // Automatika, telemechanizacija ir komunikacija naftos pramonėje. - 2004. - Nr 11. - S. 16-21.
10. Khabibulina N.Yu., Silich M.P. Sprendimų paieška pagal funkcinių santykių modelį // Informacinės technologijos
2004. - Nr. 9. - S. 27-33.
11. Jess Rete Algorithm [Elektroninis išteklius] – elektronas. Danas. -
2006. – Prieigos režimas: http://www.jessru-
les.com/jess/docs/70/rete.html
PERDILDYMO MATMENŲ VALDIKLIŲ NAUDOJIMAS DAUGIAMAČIŲ REGULIAVIMO OBJEKTŲ VALDOMOMS IŠĖJIMMS AUTONIZIZUOTI
ESU. Malyshenka
Tomsko politechnikos universitetas El. [apsaugotas el. paštas]
Susisteminta informacija apie perteklinių matmenų valdiklių įtaką stacionarių tiesinių dinaminių objektų išėjimų autonomiškumui, pasiūlyti panašų efektą suteikiančių pirminių kompensatorių sintezės ir grįžtamojo ryšio apie būseną ir išėjimą algoritmai.
Įvadas
Objekto valdomos išvesties komponentų autonominio (nepriklausomo) valdymo problema yra vienas iš svarbiausių praktinių užduočių sintezuojant sistemas. automatinis valdymas(ACS), galbūt daugumai daugiamačių išvesties valdymo objektų. Ji atsispindėjo daugelyje leidinių, įskaitant monografijas, ypač.
Išsamiau išnagrinėti linijinių stacionarių daugiamačių objektų autonomijos klausimai. Dažniausiai iškeliamos ir sprendžiamos kiekvieno objekto išėjimo, be to, valdymo vektorius (RCV), neturintis perteklinio matmens m, autonomizavimo (atsiejimo) problemos. Dėl to, kad daugeliui nurodyto tipo objektų toks sprendimas iš esmės nepasiekiamas, ši problema modifikuojama į bendresnę eilučių atsiejimo problemą, apibrėžiamą kaip Morgano problema, kai objektui su p išėjimais tai yra būtina nustatyti p rinkinių m>p valdiklių ir atitinkamą valdymo dėsnį, su kuriuo kiekviena iš rinkinių veikia tik vieną išėjimą. Taigi sprendimas nustatomas ACS klasėje su pertekliniu valdymo vektoriaus matmeniu pagal
lyginant su valdomų kintamųjų vektoriaus matmeniu.
Kartu su aukščiau išdėstytais teiginiais, autonomizavimo problemos formuluojamos ir kaip blokinio automatizavimo (atsiejimo) problemos, kai nepriklausomybė suteikiama tik tarp išvesties koordinačių, įtrauktų į skirtingus jų blokus, bet ne šių blokų (grupių) viduje. kaip kaskadinė autonomija. Pastaruoju atveju išvesties koordinačių priklausomybė tarpusavyje yra „grandinės“ pobūdžio (kiekviena paskesnė priklauso tik nuo ankstesnių, bet ne nuo vėlesnių joms nustatytoje serijoje). Ir tokiais atvejais autonomizavimo problemų sprendimas dažnai reikalauja valdymo vektoriaus dimensijos pertekliaus, palyginti su valdomų kintamųjų skaičiumi.
Autonomizacijos problemų sprendžiamumo sąlygos
Autonomizacijos problemų sprendimai dažniausiai randami tiesinių išankstinių kompensatorių arba tiesinių statinių ar dinaminių grįžtamųjų ryšių klasėje ir šiems tikslams naudojamas tiek perdavimo matricų aparatas (dažniausiai), tiek būsenos-erdvės metodai, struktūriniai ir geometriniai metodai. Paskutinės dvi
požiūriai sėkmingai papildo pirmuosius, nes iš tikrųjų tik jų pagalba pavyko nustatyti daugumą žinomų autonomizacijos problemų sprendžiamumo sąlygų [6], pateikti gilesnes jų sprendimų interpretacijas.
Autonomizacijai (atsiejimui) naudojant linijinio daugiamačio išankstinio kompensatoriaus objekto išėjimus, t.y. valdiklio, įgyvendinančio griežtą kontrolę nustatymo funkcijoje ¡d(t) be grįžtamojo ryšio, jo perdavimo matrica Wy(s) pasirenkama iš sąlygos.
Wœ(s) = Wo(s) -W y(s), (1)
kur Wo(s) yra valdymo objekto perdavimo matrica, o Wx(s) yra norima sintezuotos sistemos perdavimo matrica, atitinkanti jos atsiejimo pagal išėjimus sąlygas.
Šiems tikslams naudojamas tiesinis statinis grįžtamasis ryšys atitinka valdymo algoritmą
u(t) = F x(t) + G /u(t), (2)
ir dinamiškas -
u (s) = F (s) x (s) + G fi (s). (3)
Šiuos grįžtamuosius ryšius galima realizuoti tiek su reguliaria (matrica G yra apverčiama), tiek su netaisyklinga sistemos specifikacijos ¡d(t) transformacija.
Pagal aukščiau pateiktus dinaminius grįžtamuosius ryšius galima apibrėžti kaip ypatingą dinaminių plėtinių atvejį, kuris papildo objektą, aprašytą lygčių sistema formos „įvestis-būsena-išvestis“ forma.
x (t) = Ax (t) + Bu (t), y (t) = C x (t),
ua (t) p _ xa (t)_
kur xa(/) = ua(/), arba pagal apibendrintą operatoriaus lygtį
ir (5) = G(5) x(5") + O(5) ¡l(5).
Objekto valdymas vaizdo modeliu pagal algoritmą (2) suteikia galutinę sistemos perdavimo matricą
W^) \u003d C (51 - (A + B G (5))) ~ 1BO \u003d
J0(5) . (1 - G(5)(51 - A) -1 B) -1 O = W0(5) . H(5), (4)
čia Wo(s)=C(sI-AylB ir #(£) yra atitinkamai objekto ir išankstinio kompensatoriaus perdavimo matricos, kurios yra lygiavertės grįžtamojo ryšio efektu; I yra nxn matmens tapatybės matrica.
Kanoninė Morzės transformacija g=(T,F,G,R,S), naudojama geometriniame požiūryje su apverčiamuoju T,G,S objekto „Lo(C,A,B) perdavimo matricoje Wo(s)
(A, B, C) ^ (TA + BF + R C)T,T ~lBG, SCT)
sumažina Wo (-us) iki dvikaulių formos kairiųjų ir dešiniųjų transformacijų
W0(s) ^ Bi(s)-W0(s)-B2(s), (5)
kur B1(s) = S_1;
B2(-iai) = -G.
Iš (4) ir (5) išplaukia, kad reguliarus statinis
(2) ir dinaminis (3) grįžtamasis ryšys gali būti interpretuojami kaip dvikauziniai išankstiniai kompensatoriai, t. Kalbant apie antrąjį, atvirkštinis teiginys taip pat yra teisingas, tačiau dvikauzinis išankstinis kompensatorius H(-ai) realizuojamas pagal ekvivalentinio tiesinio statinio grįžtamojo ryšio formą tik objektui, kurio Wo yra minimalaus įgyvendinimo, ir jei ir tik jei Wo(s) ir H-1(s) – daugianario matricos.
Iš (5) taip pat galime daryti išvadą, kad dvikauziniai išankstiniai kompensatoriai ir juos atitinkantys reguliarūs statiniai ir dinaminiai grįžtamieji ryšiai negali pakeisti sistemos struktūros begalybėje ir jos savybių, ypač autonominių valdymo kanalų minimalios inercijos (vėlavimo). Šiuos pakeitimus galima pasiekti tik netaisyklingų valdymo algoritmų klasėje.
Autonomizacijos problemų sprendimo sąlygos yra susijusios su valdomų objektų struktūrinėmis savybėmis, aprašytomis jų invariantų sąrašais. Be to, tam reikalingas rinkinys nustatomas pagal tai, kokį algoritmą (kompensatorių) planuojama naudoti šiems tikslams. Atitinkamai, norint nustatyti realizuojamus atsiejimo dinaminius grįžtamuosius ryšius, pakanka turėti informaciją apie objekto įvesties-išvesties struktūrą, įterptą į jo perdavimo matricą arba į minimalią aprašo dalį būsenos erdvėje. Šios problemos išsprendžiamumą naudojant statinį grįžtamąjį ryšį apie būseną nustato vidinė valdymo objekto struktūra, visų pirma, remiantis jo Rosenbrock arba Kronecker sistemos matricų tyrimu arba kanoniniu Morzės skaidymu.
Išankstinis kompensatorius, atsiejantis objekto išėjimus pagal eilutes, gali būti nustatytas iš (1) tada ir tik tada, kai m>p, o matricos [ Wo(s) : W(s)] ir Wo(s) turi tą patį Smith-McMillan formos struktūra begalybėje.
Jei objekto perdavimo matrica turi visą eilės rangą ( būtina sąlyga linija-
atsiejimas teikiamas tik esant t>p), tada atsiejimas gali būti atliktas išankstiniu kompensatoriumi su perdavimo matrica
kur Wnob(s) yra dešinioji atvirkštinė W0(s), o k yra sveikasis skaičius, dėl kurio Wn(s) yra savoji matrica.
Įrodyta, kad atsiejimas su reguliariu statiniu grįžtamuoju ryšiu (2) yra įmanomas tada ir tik tada, jei įmanomas atsiejimas su reguliariu dinaminiu grįžtamuoju ryšiu.
(3). Savo ruožtu, pagal , pastarasis įmanomas tada ir tik tada, kai objekto perdavimo matricos begalinė struktūra yra jo eilučių begalinių struktūrų sąjunga.
Grįžtamojo ryšio reguliarumas iš tikrųjų reiškia, kad objektas neturi perteklinio valdymo vektoriaus matmenų (m=p). Todėl, jei šiuo atveju atsiejimas nepasiekiamas, o valdomas objektas turi potencialų IRTI, tai norint pasiekti kiekvienos išvesties reikšmių valdymo autonomiją, patartina naudoti šį perteklinį perteklių arba kai kuriuos konstruktyvius valdymo objekto pakeitimus. pirmiausia pasiekti savo IRTI. Taip pat reikia turėti omenyje, kad situacijose, kai m>p, reguliarus grįžtamasis ryšys gali neduoti norimo rezultato, o netaisyklingų prekompensatorių klasėje arba tokį patį grįžtamąjį ryšį galima gauti. Pavyzdžiui, objektui su perdavimo matrica
Nereguliarus grįžtamasis ryšys atitinka tiesiog priežastinius (griežtai tinkamus) išankstinius kompensatorius. Todėl sistemos, kurias jie sudaro su valdymo objektu, paprastai neišsaugos valdomo objekto struktūros begalybėje. Tai visų pirma gali būti naudojama siekiant užtikrinti sintezuotos sistemos stabilumą. Prisiminkite, kad dar 1996 metais buvo įrodyta, kad reguliaraus grįžtamojo ryšio pagalba sistemos atsiejimas ir stabilumas vienu metu gali būti pasiektas tada ir tik tada, kai objektas neturi nestabilių nekintamų ryšio nulių. Paskutiniai yra tie nekintamieji nuliai £0 (C, A, B), kurie nėra vienodi
eilučių posistemių £;(C,A,B) laikinieji ir nekintamieji nuliai. Čia c, /e 1,p yra /-oji objekto matricos C eilutė. Šie nuliai pagal atsiejimo sąlygas lemia susintetintos sistemos polių pasirinkimo apribojimus. Šiuo atveju fiksuotų (neleidžiančių savavališkai priskirti) sistemos polių, atsietų išėjimais, rinkinys būtinai turi apimti visus nekintamus ryšio nulius.
Taigi valdymo algoritmas, esant dešiniųjų nekintamų santykio nulių objekte, turi būti pasirinktas iš tos sąlygos, kad jis galės atlikti stabilumo sąlygoms reikalingą pataisą sistemos struktūrinėse savybėse. Tokie, kaip parodyta aukščiau, gali būti algoritmai su netaisyklingu grįžtamuoju ryšiu, kurie iš tikrųjų yra įdiegti sistemų su IRVE klasėje.
Visiškas atskyrimo problemos sprendimas naudojant grįžtamąjį ryšį objektams su dešiniaisiais nekintamaisiais ryšio nuliais dar nebuvo gautas. Visų pirma, norint ją įgyvendinti naudojant statinį grįžtamąjį ryšį, būtina, kaip matyti iš , KerC esančios maksimalaus valdymo poerdvės struktūrą padaryti pakankamai turtingą, kad begalinė struktūra išaugtų į esminių objektų eilučių sąrašą. Pastarieji apibūdina priklausomybės laipsnį begalybėje tarp atskirų išėjimų ir visų kitų ir gali būti apskaičiuojami pagal formulę:
pgv \u003d HPg -X Pg g \u003d 1 g \u003d 1
išėjimai nėra atsiejami naudojant reguliarų grįžtamąjį ryšį, bet yra atsiejami statinio perdavimo matricos išankstinio kompensatoriaus
Čia n yra sistemos s¡ begalinio nulio tvarka pagal Smith-McMillan objekto perdavimo matricą. Pirmoji suma (6) nustatoma visai sistemai £0 (C, A, B), o antroji - CS;, A, B), kur C / yra matrica C be /- eilė. Čia nurodytos esminės eilės nustato minimalią begalinę struktūrą, kurią galima gauti iš atsietos sistemos.
Dinaminiam netaisyklingam grįžtamajam ryšiui nustatoma tik atsiejimo sąlyga, kuri susiveda į tai, kad valdymo vektoriaus dimensijos (m-p) perteklius turi būti didesnis arba lygus stulpelio rango deficitui sąveikos matricos W0 begalybėje. (s), o pastarasis turi turėti visą eilės rangą. Nurodytas objekto W0(s) perdavimo matricos interaktorius yra atvirkštinė W0(s) hermitinei formai. Praeidami pažymime, kad objekto /-oji esminė tvarka gali būti nustatyta per jo perdavimo matricos sąveiką ir yra lygi jo -tosios stulpelio daugianario laipsniui.
Bendrieji valdymo algoritmų sintezės sprendimai ACS klasėje su IRVU net linijiniams objektams, kurie suteikia autonomiją
jų rezultatai dar nebuvo gauti. Iš tikrųjų būtina naudoti perteklinius matmenų valdiklius sprendžiant objekto eilutės atsiejimo (išėjimų automatizavimo) problemas.
Tai svarbi sąlyga tais atvejais, kai valdomas objektas netenkina šios problemos sprendimo sąlygų dvikauzinių prekompensatorių klasėje ir juos atitinkančių grįžtamųjų ryšių.
BIBLIOGRAFIJA
1. Wonham M. Linijinės daugiamatės valdymo sistemos. - M.: Nauka, 1980. - 375 p.
2. Rosenbrock H.H. Būsenos-erdvės ir kelių kintamųjų teorija. - Londonas: Nelsonas, 1970. - 257 p.
3. Meerovas M. V. Daugkartinio ryšio valdymo sistemų tyrimas ir optimizavimas. - M.: Nauka, 1986. - 233 p.
4. Malyshenko A.M. Automatinės valdymo sistemos su pernelyg dideliu valdymo vektoriaus matmeniu. - Tomskas: Tomsko politechnikos leidykla. un-ta, 2005. - 302 p.
5. Commault C., Lafay J.F., Malabre M. Tiesinių sistemų struktūra. Geometriniai ir perdavimo matricos metodai // Kibernetika. – 1991 m.
V. 27. - Nr. 3. - P. 170-185.
6. Descusse J., Lafay J.F., Malabre M. Solution of Morgan’s problem // IEEE Trans. automatas. kontrolė. - 1988. - V. aC-33. -P. 732-739.
7 Morse A.S. Tiesinių daugiakintamųjų sistemų struktūriniai invariantai // SIAM J. Control. - 1973. - Nr.11. - P. 446-465.
8. Aling H., Schumacher J.M. Devynių kartų kanoninis skaidymas tiesinėms sistemoms // Tarpt. J. Kontrolė. - 1984. - V. 39. - P 779-805.
9. Hautus M.L.J., Heymann H. Linijinis grįžtamasis ryšys. Algebrinis požiūris // SIAM J. Control. - 1978. - Nr 16. - P. 83-105.
10. Descusse J., Dion J.M. Apie tiesinių kvadratinių atsiejamų sistemų struktūrą begalybėje // IEEE Trans. automatas. kontrolė. - 1982.-V. AC-27. - P. 971-974.
11. Falb PL., Wolovich W. Atsiejimas kuriant ir sintezuojant kelių kintamųjų sistemas // IEEE Trans. automatas. kontrolė. - 1967. -V. AC-12. - P 651-669.
12. Dion J.M., Commault C. Minimalaus vėlavimo atsiejimo problema: grįžtamojo ryšio įgyvendinimas su stabilumu // SIAM J. Control. -1988 m. - Nr.26. - P. 66-88.
UDC 681.511.4
AUTOMATINIŲ VALDYMO SISTEMŲ DINAMINIŲ CHARAKTERISTIKŲ ADAPTYVŪS PSEUDOLINIJAINIAI KOREKTORIAI
M.V. Skorospeškinas
Tomsko politechnikos universitetas El. [apsaugotas el. paštas]
Siūlomi adaptyvūs automatinio valdymo sistemų dinaminių savybių pseudotiesiniai amplitudės ir fazės korektoriai. Atliktas automatinio valdymo sistemų su adaptyviais korektoriais savybių tyrimas. Parodytas pseudotiesinių adaptyviųjų korektorių panaudojimo automatinio valdymo sistemose su nestacionariais parametrais efektyvumas.
Automatinėse objektų, kurių savybės kinta laikui bėgant, valdymo sistemose būtina užtikrinti kryptingą valdymo įrenginio dinaminių charakteristikų kaitą. Dažniausiai tai daroma keičiant proporcinių-integralinių-išvestinių valdiklių (PID valdiklių) parametrus. Tokie metodai aprašyti, pavyzdžiui, , tačiau šių metodų įgyvendinimas yra susijęs arba su identifikavimu, arba su specialių metodų, pagrįstų skaičiavimais pagal pereinamojo laikotarpio kreivę, naudojimu. Abu šie metodai reikalauja daug derinimo laiko.
Straipsnyje pateikiami automatinio valdymo sistemų su PID valdikliu ir nuosekliais adaptaciniais amplitudės ir fazės pseudotiesiniais dinaminių charakteristikų korektoriais savybių tyrimo rezultatai. Šis prisitaikymo tipas yra būdingas
tai, kad valdymo sistemos veikimo metu valdiklio parametrai nesikeičia ir atitinka nustatymą iki sistemos paleidimo. Valdymo sistemos veikimo metu, priklausomai nuo naudojamo korektoriaus tipo, keičiasi korektoriaus perdavimo koeficientas arba jo sukuriamas fazės poslinkis. Šie pokyčiai atsiranda tik tais atvejais, kai yra valdomos vertės svyravimai, susiję su valdymo objekto savybių pasikeitimu arba dėl trikdžių poveikio valdymo objektui. O tai leidžia užtikrinti sistemos stabilumą ir pagerinti pereinamųjų procesų kokybę.
Pseudotiesinių korektorių pasirinkimas adaptacinei sistemai įgyvendinti paaiškinamas taip. Korektoriai, naudojami automatinio valdymo sistemų dinaminėms savybėms keisti, gali būti suskirstyti į tris grupes: linijinius, nelinijinius ir pseudotiesinius. Pagrindinis linijinių korektorių trūkumas yra susijęs su
Nagrinėjamuose pavyzdžiuose (knapinės pakrovimo problema ir patikimumo problema) sistemos būsenoms apibūdinti buvo naudojamas tik vienas kintamasis, o valdymas taip pat priskirtas vienam kintamajam. Bendruoju atveju dinaminio programavimo modeliuose būsenos ir valdikliai gali būti aprašomi naudojant kelis kintamuosius, kurie sudaro būsenos ir valdymo vektorius.
Būsenos kintamųjų skaičiaus padidėjimas sukelia skaičiaus padidėjimą galimybės sprendimai, susiję su kiekvienu etapu. Tai gali sukelti vadinamąją „dimensijų prakeikimo“ problemą, kuri yra rimta kliūtis sprendžiant vidutines ir dideles dinaminio programavimo problemas.
Kaip pavyzdį apsvarstykite kuprinės pakrovimo problemą, tačiau taikant du apribojimus (pavyzdžiui, svorio ir tūrio apribojimus):
Kur,. Kadangi užduotis turi dviejų tipų išteklius, būtina įvesti du būsenos parametrus ir . Pažymėkite , , . Tada apribojimai (1) gali būti sumažinti iki formos:
Kur. Pasikartojančiose „kupinės“ problemos dinaminio programavimo metodo lygtyse su dviem apribojimais (1):
kiekviena funkcija yra dviejų kintamųjų funkcija. Jei kiekvienas iš kintamųjų , gali turėti 10 2 reikšmes, tada funkcija turi būti pateikta lentelėse 10 4 taškais. Trijų parametrų atveju, taikant tas pačias prielaidas, reikia apskaičiuoti 10 8 funkcijų reikšmių laipsnius.
Taigi didžiausia kliūtis praktinis pritaikymas Pasirodo, dinaminis programavimas yra daug probleminių parametrų.
Atsargų valdymo problema.
Atsargų valdymo problema iškyla tada, kai reikia sukurti atsargas materialiniai ištekliai arba prekes, kad būtų patenkinta paklausa tam tikru laiko intervalu (baigtiniu arba begaliniu). Atliekant bet kokią atsargų valdymo užduotį, būtina nustatyti užsakomų produktų kiekį ir užsakymų pateikimo laiką. Paklausa gali būti patenkinta sukuriant atsargas vieną kartą visam nagrinėjamam laikotarpiui arba sukuriant atsargas kiekvienam laiko vienetui per tą laikotarpį. Pirmasis atvejis atitinka pasiūlos perteklių laiko vieneto atžvilgiu, antrasis – nepakankamą pasiūlą viso laiko periodo atžvilgiu.
Perteklinis atsargų kiekis reikalauja didesnių vieneto (laiko vieneto) kapitalo investicijų, tačiau atsargos įvyksta rečiau ir užsakymai pateikiami rečiau. Kita vertus, esant nepakankamai pasiūlai, specifinis kapitalo investicijos mažėja, tačiau užsakymų dažnumas ir trūkumo rizika didėja. Bet kuriam iš šių ekstremalių atvejų būdingi dideli ekonominiai nuostoliai. Taigi, sprendimai dėl užsakymo dydžio ir jo pateikimo laiko gali būti pagrįsti atitinkamos visų išlaidų funkcijos sumažinimu, įskaitant išlaidas, atsirandančias dėl nuostolių dėl atsargų pertekliaus ir trūkumo.
Šios išlaidos apima:
1. Įsigijimo kaštai, kurie tampa ypač svarbiu veiksniu, kai vieneto kaina išreiškiama apimties nuolaidomis, kai vieneto kaina mažėja didėjant užsakymo dydžiui.
2. Užsakymo išlaidos yra fiksuotos išlaidos, susijusios su užsakymo pateikimu. Kai paklausa patenkinama per tam tikrą laikotarpį pateikiant mažesnius užsakymus (dažniau), sąnaudos padidėja, palyginti su tuo, kai paklausa patenkinama pateikiant didesnius užsakymus (taigi ir rečiau).
3. Atsargų laikymo išlaidos, kurios yra atsargų laikymo sandėlyje išlaidos (investuoto kapitalo palūkanos, nusidėvėjimas ir veiklos sąnaudos), paprastai didėja didėjant atsargų lygiui.
4. Nuostoliai dėl trūkumo dėl reikalingų produktų atsargų trūkumo. Dažniausiai jie siejami su vartotojų ekonominėmis sankcijomis, galimu pelno praradimu. 1 paveiksle pavaizduota nagrinėjamų išlaidų rūšių priklausomybė nuo produktų atsargų lygio. Praktiškai išlaidų komponentas gali būti ignoruojamas, jei jis nesudaro reikšmingos visų išlaidų dalies. Tai leidžia supaprastinti atsargų valdymo modelius.
Atsargų valdymo modelių tipai.
Įvairius atsargų valdymo modelius lemia produktų paklausos pobūdis, kuris gali būti deterministinis arba tikimybinis. 2 paveiksle parodyta atsargų valdymo modeliuose pritaikyta paklausos klasifikavimo schema.
Deterministinė statinė paklausa daro prielaidą, kad vartojimo intensyvumas laikui bėgant nekinta. Dinaminė paklausa – paklausa žinoma, bet laikui bėgant keičiasi.
Paklausos pobūdį tiksliausiai galima apibūdinti tikimybiniais nestacionariais skirstiniais. Tačiau matematiniu požiūriu modelis tampa daug sudėtingesnis, ypač ilgėjant nagrinėjamam laikotarpiui.
Iš esmės 2 pav. pateiktą klasifikaciją galima laikyti skirtingų paklausos aprašymo abstrakcijos lygių atvaizdavimu.
Pirmajame lygyje daroma prielaida, kad paklausos tikimybinis pasiskirstymas yra stacionarus laike, t.y. per visus tiriamus laikotarpius naudojama ta pati tikimybių skirstinio funkcija. Taikant šią prielaidą, modelyje neatsižvelgiama į sezoninių paklausos svyravimų poveikį.
Antrajame abstrakcijos lygyje atsižvelgiama į paklausos pokyčius nuo vieno laikotarpio iki kito. Tačiau paskirstymo funkcijos netaikomos, o kiekvieno laikotarpio poreikiai apibūdinami vidutine paklausa. Šis supaprastinimas reiškia, kad neatsižvelgiama į atsargų valdymo rizikos elementą. Tačiau tai leidžia ištirti sezoninius paklausos svyravimus, į kuriuos dėl analitinių ir skaičiavimo sunkumų negalima atsižvelgti tikimybiniame modelyje.
Trečiajame supaprastinimo lygmenyje daroma prielaida, kad paklausa bet kuriuo laikotarpiu yra lygi visų nagrinėjamų laikotarpių žinomos paklausos vidutinei vertei, t.y. įvertinti jo pastovų intensyvumą.
Paklausos pobūdis yra vienas iš pagrindinių veiksnių kuriant atsargų valdymo modelį, tačiau yra ir kitų veiksnių, turinčių įtakos modelio tipo pasirinkimui.
1. Pristatymų vėlavimas. Pateikus užsakymą, jis gali būti pristatytas iš karto arba gali užtrukti šiek tiek laiko. Laiko intervalas nuo užsakymo pateikimo momento iki jo pristatymo vadinamas pristatymo vėlavimu. Ši reikšmė gali būti deterministinė arba atsitiktinė.
2. Atsargų papildymas. Atsargų papildymo procesas gali būti atliekamas akimirksniu arba tolygiai laikui bėgant.
3. Laiko periodas nustato intervalą, per kurį koreguojamas atsargų lygis. Atsižvelgiant į laiko trukmę, per kurią galima patikimai numatyti atsargas, nagrinėjamas laikotarpis yra baigtinis arba begalinis.
4. Atsargų kaupimo vietų skaičius. Atsargų valdymo sistema gali apimti kelis atsargų laikymo taškus. Kai kuriais atvejais šie punktai organizuojami taip, kad vienas veiktų kaip kito tiekėjas. Ši schema kartais įgyvendinama įvairių lygių kad vartotojų punktas viename lygyje galėtų tapti tiekėjo tašku kitame. Šiuo atveju yra valdymo sistema su šakota struktūra.
5. Produktų tipų skaičius. Atsargų valdymo sistemoje gali atsirasti daugiau nei vieno tipo gaminiai. Į šį veiksnį atsižvelgiama, jei yra tam tikra priklausomybė tarp produktų tipų. Taigi skirtingiems gaminiams gali būti naudojamas tas pats sandėlis arba jų gamyba gali būti vykdoma apribojant visą gamybos turtą.
Deterministiniai atsargų valdymo modeliai.
1.Deterministinis apibendrintas apibrėžimo modelis optimalus dydis produktų partijos, darant prielaidą, kad jų trūksta.
Atsargų valdymo sistema laikoma tada, kai produkcija pristatoma į sandėlį tiesiai iš gamybos linijos su pastoviu gamybos vienetų intensyvumu per laiko vienetą. Pasiekus tam tikrą atsargų lygį K gamyba sustabdoma. Gamybos atnaujinimas ir produkcijos pristatymas į sandėlį vykdomas tuo metu, kai nepatenkinta paklausa pasiekia tam tikrą vertę G. Atsargos išleidžiamos intensyviai. Žinomos šių parametrų reikšmės: - prekių vieneto sandėliavimo sandėlyje kaina per laiko vienetą; - užsakymo organizavimo išlaidos (viena produktų partija); - nuostoliai dėl nepatenkintos paklausos (bauda). Reikalaujama rasti optimalų produktų partijos tūrį ir laiko intervalą tarp pristatymo atnaujinimo taškų pagal minimalių bendrųjų sąnaudų kriterijų nuo atsargų valdymo sistemos veikimo.
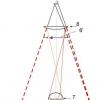
Grafiškai problemos sąlygos parodytos 3 pav.
Paveikslėlyje parodyta, kad atsargų papildymas ir išeikvojimas atliekami vienu metu kiekvieno ciklo intervalu. sukauptas atsargas K visiškai sunaudotas per intervalą. Per intervalą paklausa ne tenkinama, o kaupiasi. Nepatenkinta paklausa G padengtas intervale .
Vertė vadinama viso ciklo atsargų valdymas.- ribinės produktų atsargos, G- ribinis produktų trūkumas.
Akivaizdu, kad dabartinis produktų atsargų lygis nustatomas pagal formulę:
Iš trikampio OAB seka:
Panašiai galime apibrėžti ir (2)
Iš trikampių OAC ir CEF panašumo galime parašyti Iš lygybės išplaukia, kad (3)
Išraiška (3), atsižvelgiant į (1), bus perrašyta:
Tada visos papildymo, produktų atsargų saugojimo išlaidos ir galima bauda už nepatenkinamą paklausą bus nustatomos pagal išraišką:
Jei pateiksime išlaidas per laiko vienetą, tada vieneto sąnaudų išraiška atrodys taip:
Taigi yra dviejų argumentų funkcija K ir T, kurių optimalios reikšmės nustatomos kaip problemos sprendimas:
Norint rasti dviejų argumentų funkcijos minimumą, būtina ir pakanka išspręsti lygčių sistemą:
Tai išplaukia iš to, kad funkcija yra įgaubta jos argumentų atžvilgiu. (5) lygčių sistemos sprendimas duoda šias neneigiamas šaknis:
Minimalios bendros išlaidos vienam laiko vienetui bus:
Galime apsvarstyti ypatingus atvejus.
1. Produktų trūkumas neleidžiamas. Uždavinio sprendimas šiuo atveju gaunamas iš (6)-(8) formulės, jei paskirsime baudą Tada С 1 /С 3 =0 ir optimalios ieškomų reikšmių reikšmės bus:
Šis atvejis atitinka atsargų lygio pokyčių laikui bėgant grafiką:
2. Atsargų papildymas vyksta akimirksniu. Šiuo atveju ir atitinkamai
Akcijų lygio diagrama atrodo taip:
3. Trūkumas neleidžiamas, atsargos pasipildo akimirksniu, t.y. . Tada seka:
Šios formulės vadinamos Vilsono formulėmis, o reikšmė yra ekonominės partijos dydis.
Akcijų lygio diagrama atrodo taip:
Dinaminiai atsargų valdymo modeliai.
Ankstesnėse paskaitose buvo nagrinėjamos vieno laikotarpio atsargų valdymo statinės problemos. Daugelyje tokių problemų buvo gautos optimalaus atsargų lygio analitinės išraiškos.
Jei atsižvelgiama į sistemos funkcionavimą n periodų, o paklausa nėra pastovi, prieina prie dinaminių atsargų valdymo modelių. Šios problemos, kaip taisyklė, analitiškai nesprendžiamos, tačiau optimalius atsargų kiekius kiekvienam laikotarpiui galima apskaičiuoti dinaminio programavimo metodu.
Nagrinėjama atsargų valdymo problema, kai j-ojo laikotarpio paklausa (j=1,n) nustatoma pagal reikšmę . Tegul yra atsargų lygis j-ojo laikotarpio pradžioje, o atsargų papildymo kiekis šiuo laikotarpiu. Atsargų papildymas vykdomas akimirksniu laikotarpio pradžioje, produkcijos trūkumas neleidžiamas. Grafiškai problemos sąlygos parodytos 1 pav.
Leisti - visų išlaidų saugojimui ir papildymui j-uoju laikotarpiu. Nustatoma vertė ir , nes pasibaigus sistemoms funkcionuoti, rezervas nereikalingas.
Būtina nustatyti optimalias užsakymų apimtis kiekvienu laikotarpiu pagal minimalių bendrų išlaidų kriterijų.
Matematinis modelis užduotys atrodys taip
čia reikia nustatyti , kuri tenkintų suvaržymus (2)-(6) ir sumažintų tikslo funkciją (1).
Šiame modelyje tikslo funkcija yra atskiriama, apribojimai (2) turi pasikartojančią formą. Ir ši modelio savybė sufleruoja galimybę ją išspręsti panaudoti dinaminio programavimo metodą. Modelis (1)-(6) nuo standartinio dinaminio programavimo modelio skiriasi sąlygos buvimu; šią sąlygą galima transformuoti taip. Iš (2) ir (3) išplaukia, kad , arba galima parašyti
Tada iš (7), atsižvelgiant į (4), nustatomas galimų verčių diapazonas: arba galiausiai:
Taigi sąlyga (3)-(4) pakeičiama sąlyga (8), o modelis (1), (2), (5)-(6), (8) turi standartinę dinaminio programavimo metodo formą.
Pagal dinaminio programavimo metodą šios problemos sprendimas susideda iš šių žingsnių:
Tai išplaukia iš apribojimo (12)-(14).(j=2,n).
Atliekamas atvirkštinis algoritmo judėjimas, todėl randamos optimalios reikalingų kintamųjų reikšmės. Mažiausia tikslo funkcijos reikšmė (1) nustatoma pagal reikšmę
Užduotis dinaminis stebėjimas, kuri iš pradžių buvo vadinama užduotimi asimptotinis stebėjimas, V dabartinė forma suformulavo amerikiečių mokslininkas D. Luenbergeris 1971 m. Sąvokos „dinaminis stebėjimas“ arba „asimptotinis stebėjimas“ nevisiškai atspindi problemos esmę, kurią sudaro problemos sprendimas. atsigavimas dinaminio objekto (proceso) būsenos vektorius specialiai sukurtoje dinaminėje aplinkoje pagrįstas turima informacija. Pažymėtina, kad turima informacija gali būti pateikta dviem formomis: formoje tiesioginių matavimų rezultatai Ir modelis forma dinamiška aplinka sukeliantis egzogeninį poveikį.
Ne visada įmanoma užtikrinti stebėjimo proceso asimptotinį pobūdį dėl nepilno kintamųjų ir efektų išmatavimo, nekontroliuojamų trukdžių, neatsižvelgtų modelio ir signalo veiksnių ir kt. Šiuo atžvilgiu teisingiausia yra vartoti sąvoką " dinaminis stebėtojas„(DNU), terminologinio vulgarizmo atsiradimas taip pat įmanomas“ stebėtojas».
Iš pradžių pagrindinė DNU naudojimo sritis buvo dinamines sistemas, kurie apima valdymo signalų generatorius, kurie naudoja informaciją tiesioginio ir grįžtamojo ryšio forma pagal objekto būklę arba šaltinis baigtinių matmenų egzogeninė įtaka.Šiuo metu DNU panaudojimo sfera gerokai išsiplėtė dėl naujos kartos matavimo kompleksai kurie nusprendžia matavimo rezultato formavimo DNU algoritminėje aplinkoje užduotis. Toliau pateikiami klausimai, susiję su naudojimu DNU kompozicijojeformuotojai valdymo signalus.
Ankstesniuose skyriuose valdymo signalų generavimo algoritmai pagrįsti vienu sisteminė panašumo samprata, kuris buvo realizuotas vienu atveju m modalinio valdymo metodas dinaminis objektas, kitu metodu apibendrintas izodromas valdymas. Prieš spręsdami dinaminio stebėjimo problemas kiekvieno iš šių valdymo metodų rėmuose, pateiksime visos sistemos dinaminio stebėjimo įrenginio apibrėžimą.
Visos sistemos formuluotėje daugiausia informacijos apie valdomų procesų eigą (dinaminius objektus) talpina būsenos vektorius, kuriam būdinga didžiausia dimensija, lyginant su kitais proceso kintamaisiais. Tačiau būsena yra paslėptas (vidinis) kintamasis, turintis visą informaciją apie sistemos proceso „paslaptį“; ji neturėtų būti prieinama tiesioginiam matavimui. Išoriniai kintamieji yra vektorius išeiti, vektorius valdymo signalas, klaidų vektorius meistro atkūrimas egzogeninis poveikis, kartais savaime poveikį. Informacinė aplinka gali būti papildyta šaltinio modelis egzogeninis poveikis (MIEV).
Dabar galima pateikti dinaminio stebėjimo įrenginio (DNU) apibrėžimą.
16.1 (O16.1) apibrėžtis. Dinaminis stebėjimo įrenginys yra techninę ar algoritminę aplinką, kuriame įdiegtas visų tiesioginiam matavimui prieinamų komponentų funkcinis ekranas  meistro įtaka
meistro įtaka  , komponentai
, komponentai  klaidų vektorius
klaidų vektorius  , valdymo signalas
, valdymo signalas  , komponentai
, komponentai  išvesties vektorius
išvesties vektorius  , ir galbūt komponentai
, ir galbūt komponentai  būsenos vektorius
būsenos vektorius  į vektorių
į vektorių  būsenos vektoriaus, turinčio asimptotinę savybę, įverčiai, vaizduojami žymėjimu
būsenos vektoriaus, turinčio asimptotinę savybę, įverčiai, vaizduojami žymėjimu
Kur  yra matrica bendruoju specialios (negrįžtamos) transformacijos atveju.
yra matrica bendruoju specialios (negrįžtamos) transformacijos atveju.
Daugeliu praktinių atvejų dinaminio stebėjimo problema išsprendžiama poromis, o tais atvejais, kai problema redukuojama iki autonominės dinaminės sistemos versijos, tada išvesties vektoriais.  arba klaidų
arba klaidų  .
.
16.1 pastaba (AP 16.1).Žemiau pateikiamos sintezės problemos dinaminis modalinis ir dinaminis apibendrintas izodrominis valdymas, kurios sprendžiamos remiantis dinaminių stebėjimo prietaisų ir valdymo signalų generavimo prietaisų agregacija, gauta remiantis objekto būsenos vektoriaus visiško išmatuojamumo hipoteze. Šiuo atžvilgiu modalinis valdymas ir apibendrintas izodrominis valdymas, suformuotas tokiu būdu (t. y. 15 skirsnyje aprašytais metodais), priešingai nei dinamiškas mes paskambinsime algebrinė modalinis ir algebrinė apibendrintas izodrominis valdymas.
Apsvarstykite modalinio valdymo atvejį.
Nustatykime užduotį stebėjimo įrenginio, leidžiančio atkurti vektorių, formavimas  ištisinio dinaminio objekto būsenos, turinčios vektorinės matricos aprašymą
ištisinio dinaminio objekto būsenos, turinčios vektorinės matricos aprašymą
Prieš pradėdami spręsti dinaminio stebėjimo įrenginio formavimo problemą, atsižvelgiame į vieną " hipotetinis" situacija. Norėdami tai padaryti, tarkime, kad , tada už pilnai išmatuojamas vektorius  vektorius
vektorius  objekto būsenos (16.2) su savo visišku neišmatuojamumu gali būti atkurtas dėl santykių
objekto būsenos (16.2) su savo visišku neišmatuojamumu gali būti atkurtas dėl santykių
 (16.3)
(16.3)
Nesunku suprasti, kad toks stebėjimo įrenginys turėtų būti vadinamas "statinis" nes jo dinamika nulinė.
Remdamiesi nagrinėjama „hipotetine“ situacija, galime suformuluoti tokį teiginį be įrodymų.
16.1 tvirtinimas (U16.1). Dėl teisingas veikimas dinaminis stebėjimo įrenginys, kuriame visi  vektoriaus komponentai
vektoriaus komponentai  objekto būsena, kuri
objekto būsena, kuri  , būtina įvykdyti sąlygą
, būtina įvykdyti sąlygą
Kur  dinaminio stebėtojo būsenos vektorius.
dinaminio stebėtojo būsenos vektorius.
16.2 pastaba (AP 16.2). Situacija, kai tenkinama nelygybė, naudojama tuo atveju, kai vektoriaus matavimo procesas  dinamišką objektą lydi pastebimi trukdžiai, kad užduotis būtų atlikta atsigavimas objekto būsenos vektorius su vienu metu filtravimas matavimai.
dinamišką objektą lydi pastebimi trukdžiai, kad užduotis būtų atlikta atsigavimas objekto būsenos vektorius su vienu metu filtravimas matavimai.
Grįžkime prie santykio (16.1), kad išanalizuoti sistemos apkrovą, tenkančią panašumo matricai  matmenys
matmenys  . Šios matricos matmenys ir forma visiškai atspindi visą dinaminių stebėjimo įrenginių konstravimo galimybių įvairovę:
. Šios matricos matmenys ir forma visiškai atspindi visą dinaminių stebėjimo įrenginių konstravimo galimybių įvairovę:
- Jeigu  adresu
adresu  ir kur
ir kur  pilna dimensija ir į pagrindu
stebimas dinamiškas objektas;
pilna dimensija ir į pagrindu
stebimas dinamiškas objektas;
- Jeigu  adresu
adresu  ir kur
ir kur  , tada konstruojamas dinaminis stebėtojas pilna dimensija V pagrindu, kuris neatitinka pagrindo stebima dinamika objektas, dažniausiai tai yra kai kurie kanoniniu pagrindu;
, tada konstruojamas dinaminis stebėtojas pilna dimensija V pagrindu, kuris neatitinka pagrindo stebima dinamika objektas, dažniausiai tai yra kai kurie kanoniniu pagrindu;
- Jeigu  adresu
adresu  , tada konstruojamas dinaminis stebėtojas nepilnas matmuo savavališkai, dažniausiai tai yra kai kurie kanoniniu pagrindu; Šiuo atveju, norint atkurti visus objekto būsenos vektoriaus komponentus, naudojama kompozicija iš išvesties vektoriaus ir LLD būsenos vektoriaus matavimo, taip pat matrica, sudaryta iš matricų
, tada konstruojamas dinaminis stebėtojas nepilnas matmuo savavališkai, dažniausiai tai yra kai kurie kanoniniu pagrindu; Šiuo atveju, norint atkurti visus objekto būsenos vektoriaus komponentus, naudojama kompozicija iš išvesties vektoriaus ir LLD būsenos vektoriaus matavimo, taip pat matrica, sudaryta iš matricų  .
.
Dinamiški viso matmens stebėtojai pirminio objekto pagrindu pastatytas remiantis toliau nurodytais dalykais sistemos svarstymai esančiame kitame pareiškime.
16.2 teiginys (U16.2). Dinaminis vektorių prižiūrėtojas  nuolatinio valdymo objekto būsena (16.2), kuri įgyvendina stebėjimo algoritmas, parašyta vektorine matrica
nuolatinio valdymo objekto būsena (16.2), kuri įgyvendina stebėjimo algoritmas, parašyta vektorine matrica
Kur  DNU būsenos vektorius,
DNU būsenos vektorius,  , pasižymi įverčio konvergencijos procesu
, pasižymi įverčio konvergencijos procesu  į įvertintą vektorių
į įvertintą vektorių  objekto būsena (16.2), nustatoma pagal matricos savųjų reikšmių algebrinį spektrą
objekto būsena (16.2), nustatoma pagal matricos savųjų reikšmių algebrinį spektrą
 .
□(16.6)
.
□(16.6)
Įrodymas. Norėdami įrodyti suformuluoto teiginio teisingumą, įvedame vektorių  stebėjimo likučiai, kuris bendram stebėjimo problemos atveju turi reprezentaciją
stebėjimo likučiai, kuris bendram stebėjimo problemos atveju turi reprezentaciją
 ,
(16.7)
,
(16.7)
o nagrinėjamai bylai – dėl lygybės  įgauna formą
įgauna formą
 .
(16.8)
.
(16.8)
Nesunku pastebėti, kad konvergencijos procesas  į įvertintą vektorių
į įvertintą vektorių  formoje (16.1) naudojant vektorių
formoje (16.1) naudojant vektorių  stebėjimo likučiai įgauna formą
stebėjimo likučiai įgauna formą
 .
(16.9)
.
(16.9)
Sukurkime stebėjimo proceso konvergencijos dinamikos modelį, naudodami stebėjimo likutinį vektorių (16.8).
kas parašyta formoje
iš kur vektoriui  galima užrašyti stebėjimo likučius
galima užrašyti stebėjimo likučius
16.3 pastaba (AP 16.3). Jei kontrolinio objekto (16.2) ir LLD (16.5) pradinės būsenos, tai dėl (16.11) stebėjimo neatitikimas  ir stebimas vektorius
ir stebimas vektorius  ir jo įvertinimas
ir jo įvertinimas  sutampa identiškai, tai yra santykis
sutampa identiškai, tai yra santykis 
Pristatome apibrėžimą dinaminis modalinis valdymas.
16.2 apibrėžimas (O16.2).dinamiškas
modalinis valdymas vadinsime formos valdikliu (15.48), kuriame neigiamas grįžtamasis ryšys apie vektorių  valdymo objekto būsena pakeičiama Atsiliepimas pagal vektorių
valdymo objekto būsena pakeičiama Atsiliepimas pagal vektorių  vektoriniai įverčiai
vektoriniai įverčiai  , susidaro priklausomai nuo matricos įgyvendinimas
, susidaro priklausomai nuo matricos įgyvendinimas
 dėl proporcijų:
dėl proporcijų:
1. val 

 (16.12)
(16.12)
2. (16.13 val.)
3. (16.14 val.)
Dabar sukurkime dinaminio modalinio valdymo sintezės algoritmą įverčio sudarymo atveju  vektorius
vektorius  DNU aplinkoje (16.5) suformuoto (16.12) formos objekto būsena.
DNU aplinkoje (16.5) suformuoto (16.12) formos objekto būsena.
ŠVIETIMO IR MOKSLO MINISTERIJA
RUSIJOS FEDERACIJA
MASKAVOS VALSTYBINIO UNIVERSITETAS
FIZIKOS FAKULTETAS
Fizinių ir matematinių kontrolės metodų katedra
UŽDUOTYS
įjungta kursiniai darbai
« Optimalus valdymas linijinės dinaminės sistemos“
kurse „Optimalus valdymas“
Sudarė: prof., d.t.s. Afanasjevas V.N.
Maskva 2014 m
- DARBO TIKSLAS
Matematinė optimalumo konstrukcija tiesinės sistemos valdymas.
- DARBO TURINYS
- Reikalingos teorinės medžiagos studijavimas pagal šaltinius;
- Analitinio problemos sprendimo gavimas;
- Valdymo sistemos blokinės schemos sudarymas.
- Valdymo sistemos matematinio modeliavimo, naudojant paketą, įgūdžių įgijimas matlab.
- DARBO LAIKAS
VIII semestras, 4 kursas.
Užduotys išduodamos 5 akademinę savaitę.
Atliktų darbų priėmimas vykdomas 10 ir 11 sav.
PAGRINDINĖS TEORINĖS NUOSTATOS.
PROBLEMOS FORMULIAVIMAS
Daugelį valdymo objektų galima tiksliai apibūdinti tiesiniais dinaminiais modeliais. Pagrįstai pasirinkus kvadratinius veikimo kriterijus ir kvadratinius apribojimus, šiuo atveju galima susintetinti labai sėkmingus valdymo įrenginius su linijiniu grįžtamuoju ryšiu.
Tegul valdomos dinaminės sistemos apibūdinamos tiesinėmis diferencialinėmis lygtimis
(1)
čia: - sistemos būsena; - sistemos valdymo įėjimas; - Sistemos išvestis. Taigi matricos A(t), B(t), C(t) turėti atitinkamus matmenis: n x n , n x r , m x n . Tarkime, kad kontrolei taip pat nėra taikomi jokie apribojimai.
Apibrėžkime sistemos paskirtį fiziniu požiūriu. Leisti būti "norima" sistemos produkcija. Būtina rasti tokią kontrolę u(t) , kuriame įvyko sistemos klaida
(2)
būtų maža.
Nuo vadovybės u(t) neapsiriboja nagrinėjama problema, tada, siekiant išvengti didelių pastangų valdymo kontūre ir didelio energijos suvartojimo, į kokybės kriterijų galima įtraukti atitinkamą reikalavimą, kuriame atsižvelgiama į šiuos faktus.
Dažnai svarbu padaryti „mažą“ klaidą pereinamojo laikotarpio pabaigoje.
Šių fizinių reikalavimų pavertimas vienokiu ar kitokiu matematinės funkcijos pavidalu priklauso nuo daugelio priežasčių. Šiame skyriuje apžvelgsime tam tikrą kokybės kriterijų klasę, kurios forma yra tokia:
(3)
kur F, Q(t) teigiamos pusiau apibrėžtos matmenų matricos m x m ; R(t) teigiama-apibrėžta dimensijos matrica r x r .
Apsvarstykite kiekvieną funkcinės (3) terminą. Pradėkime nuo. Akivaizdu, kad nuo matricos Q(t) yra teigiamas pusiau apibrėžtas, tada šis terminas yra neneigiamas bet kuriam e(t) ir lygus nuliui at e (t )=0 . Kadangi kur q ij (t ) matricos elementas Q (t ), e i (t ) ir e j (t ) vektoriaus komponentai e(t), tada didelės klaidos įvertinamos „brangiau“ nei mažos.
Apsvarstykime narį. Nes R(t) yra teigiama apibrėžtoji matrica, tada šis terminas yra teigiamas bet kuriam ir „baudžia“ sistemą už didelius valdymo veiksmus nei už mažus.
Pagaliau, . Šis terminas dažnai vadinamas galutinėmis valstybės išlaidomis. Jo paskirtis – garantuoti klaidos „mažumą“ perėjimo proceso pabaigoje.
Kokybės kriterijus (3) yra matematiškai patogus, o jo sumažinimas lemia tai, kad optimalios sistemos pasirodo tiesinės.
Optimali valdymo problema formuluojama taip: pateikiama linijinė dinaminė valdymo sistema (1) ir funkcinė (3). Reikalaujama rasti optimalią kontrolę, t.y. valdymas, kurio veikiama sistema (1) juda taip, kad funkcinė (3) būtų kuo mažesnė. Bus ieškoma sprendimų dėl problemų, susijusių su atvira valdymo veiksmų pokyčių sritimi ir problemomis, kuriose valdymo veiksmai priklauso tam tikram rinkiniui.
- PRATIMAS
- Išnagrinėti linijinių dinaminių sistemų optimalaus valdymo konstravimo metodą
- Atsižvelgdami į varianto numerį, paimkite problemos sąlygą iš programos
- Patikrinkite valdomumo ir stebėjimo savybes
- Sukurkite Luenbergerio stebėtoją
- Gaukite analitinį problemos sprendimą
- Nubraižykite optimalios valdymo sistemos blokinę schemą
- Ištirti svorio koeficientų įtaką pereinamųjų procesų kokybei ir kokybinės funkcijos vertei
- Valdymo sistemos matematinis modeliavimas naudojant paketą matlab
TAIKYMAS
Valdymo objektas:
Funkcionalumas:.
1 variantas
Apsvarstykite adresu:
- ;
2 variantas
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 3
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 4
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 5
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 6
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 7
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 8
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 9
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 10
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 11
Apsvarstykite adresu:
- ;
12 variantas
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 13
Apsvarstykite adresu:
- ;
Pasirinkimo numeris 14
Apsvarstykite adresu:
14.1. ;
14.2. .
Pasirinkimo numeris 15
Apsvarstykite, kada
15.1. ;
15.2. .
LITERATŪRA
- Afanasjevas V.N., Kolmanovskis V.B., Nosovas V.R. Valdymo sistemų projektavimo matematinė teorija baigti mokyklą. M., 2003, 616 p.
- Afanasjevas V.N. Nepertraukiamų dinaminių sistemų optimalaus valdymo teorija. Analitinis dizainas. M. Maskvos valstybinio universiteto Fizikos fakultetas 2011, 170 p.
- Afanasjevas V.N. Optimalios valdymo sistemos. RUDN. 2007. - 260 p.
Įvadas. Rinkos ekonomika Ukrainoje reikia naujo požiūrio į valdymą: išryškėja ekonominiai, rinkos efektyvumo kriterijai. Mokslo ir technikos pažanga ir dinamika išorinė aplinka jėga šiuolaikiška gamybos įmonės transformuoti į sudėtingesnes sistemas, kurioms reikalingi nauji valdymo metodai. Įmonių orientacijos į rinką stiprinimas, drastiški išorinės aplinkos pokyčiai verčia kurti konkurencingas valdymo sistemas, skirtas integruotai plėtoti. valdymo sprendimai, taigi ir efektyvesni didelio masto problemų sprendimo būdai ir algoritmai.
Darbai atlikti pagal valstybinę mokslinę techninę programą 6.22 – perspektyvus Informacinės technologijos ir Odesos Lenino ordino Sausumos pajėgų instituto mokslinės ir mokslinės-techninės veiklos sistemų planai 2004 m. atitinkamai tiriamojo darbo tema.
Naujausių tyrimų analizė.Šiuo metu vienas iš pagrindinių ir efektyviausių didelio masto kontrolės problemų sprendimo būdų yra dekomponavimas. Šis metodas sujungia metodų grupę, pagrįstą pradinės didelės dimensijos problemos išskaidymu į subproblemas, kurių kiekviena yra daug paprastesnė už pradinę ir išsprendžiama nepriklausomai nuo kitų. Ryšys tarp atskirų užduočių vykdomas „koordinuojančios“ užduoties pagalba, kuri taip pat yra paprastesnė nei pradinė. Tam valdymo problema perkeliama į tokią formą, kuri tenkintų skaidomumo reikalavimus, iš kurių pagrindiniai yra: tikslo funkcijos adityvumas (atskyramumas); blokinis apribojimų pobūdis; blokinių jungčių buvimas. Tačiau sprendžiant praktines aukštos dimensijos optimalaus valdymo sintezės problemas, dažnai sunku patenkinti išvardintus reikalavimus. Pavyzdžiui, gamybos sistemos kokybė gali būti vertinama pagal kriterijų labai bendras tipas, kuris gali būti neatsiejamas atskirų posistemių valdymo užduočių atžvilgiu. Todėl pirminį valdymo uždavinį konvertuojant į išskaidomumo reikalavimus tenkinančią formą, neišvengiami įvairūs supaprastinimai, aproksimacijos, įvairūs problemos skaidymo į lokalias subužduotys variantai, t.y. suvaržymų blokai ir jungtys. Visi šie veiksniai turi įtakos tiek sprendimo kokybei, tiek skaičiavimų sudėtingumui ieškant optimalaus sprendimo.
Atsižvelgiant į tai, kad iki šiol nėra metodų, leidžiančių kokybiškai įvertinti šių veiksnių įtaką sprendimo kokybei, atrodo aktualu sukurti tokį didelio masto problemos sprendimo metodą, kuris paliktų tam tikrą laisvę renkantis projekto struktūrą. vietines problemas, taip pat tenkinti ir įvertinti įvairių supaprastinimų įtaką sprendimų kokybei.
Iš literatūros šaltinių analizės matyti, kad priimtini skaitiniai netiesinio optimizavimo uždavinių sprendimo metodai yra susiję su didelėmis kompiuterio laiko ir atminties sąnaudomis, o dėl linijavimo prarandama kontrolės kokybė. Todėl patartina, kad išvystyta naujas metodas problemos sprendimas išlaikė savo nelinijinį pobūdį, o optimalus valdymas buvo nustatytas decentralizuotos skaičiavimo struktūros rėmuose.
Tyrimo objektas – didelių matmenų valdymo uždavinių sprendimo algoritmai.
Tyrimo objektas yra požiūrio, pagrįsto pirminės didelės dimensijos problemos ir atitinkamos blokų skaidymo problemos lygiavertiškumo arba kvaziekvivalentiškumo idėja, sukūrimas.
Mokslinė užduotis – sukurti algoritmus, kurių naudojimas užtikrintų optimalų valdymą decentralizuotoje struktūroje, nereikalaujant pasikartojančio informacijos mainų tarp valdymo lygių.
Darbo tikslas – sukurti ir papildyti taikomosios teorijos elementus bei į problemas orientuotus įrankius, optimizuojančius didelių matmenų valdymo problemas.
Mokslinė naujovė slypi didelio masto valdymo problemų optimizavimo algoritmų sintezės metodo kūrime decentralizuotoje skaičiavimo struktūroje, kai nereikia organizuoti iteracinio proceso tarp valdymo lygių.
Pagrindinė medžiaga.Tegu nagrinėjamą nuolatinės dinaminės sistemos optimalaus valdymo problemą nustato diferencialinė lygtis
(1)
pagal kriterijų
 (2)
(2)
![]() adresu
adresu
kur - n m yra matmenų valdymo vektorius; - n yra matmenų funkcija, kurios komponentai yra nuolat diferencijuojami argumentų atžvilgiu; - išgaubta, diferencijuojama skaliarinė funkcija; yra atitinkamai pradinis ir galutinis laikas.
Norėdami pavaizduoti valdymo objektą (1) kaip sąveikaujančių posistemių seriją, išplečiame (1) į Teiloro eilutę pusiausvyros taško atžvilgiu.
kur,
arba
(3)
Išraiškoje (3) A ir B yra bloko įstrižainės matricų dalys ir atitinkamai su blokais ir .
ir ir yra atitinkamai įstrižainės dalys ir.
Įvedus ryšio vektorių taip, kad duota in i – šis komponentas nustatomas pagal išraišką
![]() ,
(4)
,
(4)
galite parašyti lygtįi- posistemis
kur - - matmenų valdymo vektorius; - - matmenų būsenos vektorius; - n – matmenų ryšio vektorius.
Siūlomas skaidymo metodas optimaliam valdikliui susintetinti yra toks. Sudedamosios posistemės
o atsižvelgdami į santykį su kitais posistemiais vadiname izoliuotais.
Sudėtis i - s i = 1,2,…, P posistemės reprezentuoja modelį
(5)
kur ir yra blokų įstrižainės matricos su blokais ir atitinkamai.
Suformuluokime kriterijų
 ,
(6)
,
(6)
kur yra teigiama pusiau apibrėžta bloko įstrižainė matrica

su kaladėlėmis; - teigiama-apibrėžta bloko-įstrižainės matrica

su blokeliais , - optimalus valdymas.
Matricos ir nustatomos iš problemų (1) – (2) ir (5) – (6) kvaziekvivalentiškumo sąlygos, kuri turi formą
Čia,,
Kur ![]() .
.
Norėdami nustatyti matricos elementus, turime algebrinių lygčių sistemą
![]() .
(7)
.
(7)
Išsprendę (7) lygtį, turime P nepriklausomų optimizavimo problemų, susijusių su matricų bloko įstrižaine struktūra
![]() ,
,
Vietinis optimalus valdymas turi formą
![]() , (8)
, (8)
![]() , tenkina tiesinis diferencialinė lygtis.
, tenkina tiesinis diferencialinė lygtis.
, ![]() .
(9)
.
(9)
Visuotinis sprendimas yra optimalių sprendimų sudėtis
![]() .
(10)
.
(10)
Išvados. Taigi, optimalios valdymo sintezės problema pirminei aukšto dimensijos problemai (1) - (2) redukuojama iki šios: lokalių optimizavimo problemų formulavimas (5) - (6); lokalių uždavinių parametrų nustatymas pagal (3) ir (6) formules; vietinių problemų sprendimas pagal (8) - (9); vietinių tirpalų sudėtis (10).
Kokybės praradimas optimalaus požiūrio į maždaug optimalių valdiklių sintezę gali būti įvertintas naudojant formules, pasiūlytas .
Nauja Siūlomas valdymo sprendimo būdas, paremtas lygiavertiškumo idėja, pradinė didelės apimties problema ir atitinkanti vieningą problemos sudėtį.
1. Mesarovičius M., Mako D., Takahara I. Hierarchinių daugiapakopių sistemų teorija. – M.: Mir, 1973 m.
2. Aesdon L.S. Didelių sistemų optimizavimas. – M.: Mir, 1975 m.
3. Albrechtas E.G. Apie optimalų netiesinių sistemų stabilizavimą. - Taikomoji matematika i mechanika, 1961, 25 eil.
4. Živoglyadovas V.P., Krivenko V.A. Didelio masto valdymo problemų su neatskiriamu veikimo kriterijumi skaidymo metodas. II sąjunginės tarpuniversitetinės konferencijos tezės „Matematinės, algoritminės ir Techninė pagalba APCS". Taškentas, 1980 m.
5. Hassan Mohamed, Sinqh Madan G. Netiesinių sistemų optimizavimas naudojant naują dviejų lygių metodą.„Automatika“, 1976, 12, Nr.4.
6. Mahmoudas M.S. Dinaminis kelių lygių optimizavimas netiesinių sistemų klasei „Int. J. Kontrolė“, 1979, 30, Nr.6.
7. Krivenko V.A. Kvaziekvivalentinė optimizavimo modelių transformacija valdymo algoritmų sintezės uždaviniuose. - Knygoje: Pritaikymas ir optimizavimas didelėse sistemose. - Frunze, 1985 m.
8. Krivenko V.A. Valdymo algoritmų sintezės metodas, naudojant tikslinės funkcijos modifikavimo idėją. - Frunze, 1985 m.
9. Rumjantsevas V.V. Apie optimalų valdomų sistemų stabilizavimą. – Taikomoji matematika ir mechanika, 1970, nr. 3.
10. Ovezgeldievas A.O., Petrovas E.T., Petrovas K.E. Daugiamatių vertinimo ir optimizavimo modelių sintezė ir identifikavimas. - K .: Naukova Dumka, 2002 m.
Atsakymai į klausimus