Darbo tikslas
Susipažinkite su laipsniško ekstremalaus valdymo sistemų konstravimu valdymo metu dinamiški objektai su vėlavimu.
Teorinė dalis
Bet kurioje gamyboje (gamyboje, kombinate) yra tam tikras pagrindinis techninis ir ekonominis rodiklis (TEI), visiškai apibūdinantis šios gamybos efektyvumą. Pravartu išlaikyti šį pagrindinį rodiklį esant kraštutinei vertei. Toks apibendrintas rodiklis gali būti įmonės pelnas.
Visiems technologiniams procesams (cechuose, skyriuose), kurie yra gamybos dalis, remiantis pirmaujančiu TEP, galima suformuluoti savo privačius TEP (pavyzdžiui, gamybos vieneto savikaina esant tam tikram našumui). Savo ruožtu technologinis procesas paprastai galima suskirstyti į keletą sekcijų (technologinių vienetų), kurių kiekvienam taip pat galima rasti optimalumo kriterijų Q . Pasiekus ekstremalumą Q privatus proceso TEC ir visos gamybos TEC priartės prie ekstremumo.
Optimalumo kriterijus Q tai gali būti tiesiogiai koks nors technologinis parametras (pavyzdžiui, degimo įrenginio liepsnos temperatūra) arba tam tikra funkcija, priklausanti nuo technologinių parametrų (pavyzdžiui, efektyvumas, reakcijos terminis efektas, naudingo produkto išeiga tam tikram laikotarpiui). ir kt.).
Jei optimalumo kriterijus Q yra kai kurių objekto parametrų funkcija, tada šiam objektui optimizuoti galima pritaikyti ekstremalios kontrolės sistemą (ESR).
Bendruoju atveju optimalumo kriterijaus reikšmė priklauso nuo objekto įvesties parametrų skaičiaus pasikeitimo. Yra daug valdymo objektų, kurių optimalumo kriterijaus Q reikšmė daugiausia priklauso nuo vieno įvesties parametro pakeitimo. Tokių objektų pavyzdžiai yra įvairių tipų krosnių įrenginiai, kataliziniai reaktoriai, cheminis vandens valymas šiluminėse elektrinėse ir daugelis kitų.
Taigi ekstremalios valdymo sistemos skirtos optimalių valdymo veiksmų verčių paieškai, t.y. tokios reikšmės, kurios suteikia kažkokio Q kriterijaus kraštutinumą proceso optimalumas.
Ekstremalios valdymo sistemos, skirtos optimizuoti objektą vienam įvesties kanalui, vadinamos vieno kanalo. Tokie SER naudojami plačiausiai.
Optimizuojant objektus, turinčius didelę inerciją ir gryną uždelsimą, patartina naudoti pakopines ekstremalias sistemas, kurios veikia kontroliuojamą objekto įvestį atskirais laiko intervalais.
Tiriant ekstremalią sistemą, daugeliu atvejų patogu pavaizduoti optimizavimo objektą kaip nuoseklią trijų grandžių jungtį: įvesties tiesinė inercinė nuoroda, ekstremalioji statinė charakteristika. adresu = F(X) ir išėjimo tiesinė inercinė jungtis (1 pav.). Tokia struktūrinė pakeitimo schema gali būti pavadinta LNL.
Ryžiai. 1LNB ekstremalaus objekto schema
Patogu paimti abiejų tiesinių grandžių stiprinimo koeficientus, lygius vienetui. Jei įėjimo tiesinės jungties inercija yra nežymiai maža, palyginti su išėjimo linijinės jungties inercija, objektą galima pavaizduoti lygiaverte CL grandine; jei išėjimo tiesinės grandies inercija yra nereikšminga, - LN ekvivalentine grandine. Objekto vidinės inercinės savybės paprastai vaizduojamos išvesties inercine grandimi; sistemos matavimo prietaisų inercija priklauso tai pačiai grandinei.
Įvesties linijinė nuoroda dažniausiai atsiranda objekto blokinėje schemoje, kai ekstremalios sistemos pavara (IM) veikia patį optimizavimo objektą per saitą su inercija, pavyzdžiui, jei optimizuojamo objekto įvesties parametras yra temperatūra, ir IM įtakoja jo pokytį per šilumokaitį. Pavaros inercija taip pat nurodoma įėjimo tiesinei daliai.
Pažymėtina, kad valdymo objekto koordinatės tarp tiesinių ir nelinijinių grandžių didžiąja dauguma atvejų negali būti išmatuotos; tai lengva įgyvendinti tik modeliuojant sistemą.
Kai kuriais atvejais objekto struktūrinę pakeitimo schemą galima nustatyti tik eksperimentiniu būdu.
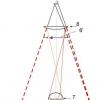
Norėdami tai padaryti, pakeiskite objekto įvesties koordinatę v 1, atitinkančią išvesties reikšmę z 1 , prieš v 2 (2 pav., A), kurioje objekto išvesties koordinatės vertė dėl pereinamojo proceso bus maždaug lygi z 1 .
Jei šis trikdymas praktiškai nesukėlė jokio pastebimo objekto išvesties koordinatės pokyčio (2 pav., b), tada įvesties inercinės jungties nėra. Jei pereinamasis procesas, atsirandantis dėl tokio sutrikimo, yra kokybiškai artimas tai, kas parodyta Fig. 2, V, tada objekto įvestyje egzistuoja inercinis ryšys.

Ryžiai. 2Ekstremalaus operatyvinio stiprintuvo charakteristikos
Objektų LN ir LN struktūra, kurioje aprašyta tiesinė dalis diferencialinė lygtis pirmos eilės su uždelsimu arba be jo ir statinė charakteristika y=f(x) gali būti bet kuri ištisinė funkcija su vienu kraštutinumu veikimo diapazone gali būti pakankamai apytikslė didelis skaičius pramoniniai objektai optimizavimas.
Ekstremalios valdymo sistemos:
Automatinės optimizavimo sistemos su ekstremalia saugykla
Ekstremaliuose valdikliuose SAO, įsimenant ekstremumą, skirtumas tarp dabartinės išėjimo signalo vertės tiekiamas į signalo relę adresu objektą ir jo vertę ankstesniu laiko momentu.
ACS su ekstremaliu įsiminimu struktūrinė schema parodyta fig. 3 . Objekto išvesties vertė APIE su statine charakteristika y=f(X) pateiktas saugojimo įrenginyje atmintis ekstremalus reguliatorius.

Ryžiai. 3Automatinė optimizavimo sistema su ekstremaliu įsiminimu
Tokios sistemos saugojimo įrenginys turėtų fiksuoti tik įvesties signalo padidėjimą, t.y. įsiminimas vyksta tik didinant y. Sumažinti adresu saugojimo įrenginys nereaguoja. Signalas iš saugojimo įrenginio nuolat tiekiamas į palyginimo elementą ES, kur lyginamas su esama signalo verte y. Skirtumo signalas adresu-u maks iš palyginimo elemento eina į signalinę relę SR. Kai skirtumas adresu-y max pasiekia negyvos juostos reikšmę ties n Signum relė, ji apverčia pavarą JUOS, kuris turi įtakos įvesties signalui X objektas. Įjungus atminties įrenginio saugomą signalinę relę atmintis prasmė y atstatyti ir signalo saugojimas adresu vėl prasideda.
Sistemos su ekstremalia atmintimi dažniausiai turi pavaras su pastoviu važiavimo greičiu, t.y. dx/dt=±k 1 Kur k= konst. priklausomai nuo signalo Ir Signum-relės pavara keičia judėjimo kryptį.
Paaiškinkime ŽŪR darbą su ekstremumo išmokimu atmintinai. Tarkime, kad šiuo metu t 1 (4 pav.), kai objekto būsena apibūdinama atitinkamai įvesties ir išvesties signalų reikšmėmis X 1 Ir adresu 1 (taškas M 1), ekstremalus reguliatorius įjungtas. Šiuo metu atminties įrenginys išsaugo signalą adresu 1 . Tarkime, kad ekstremalus reguliatorius po to, kai buvo pradėtas eksploatuoti, pradėjo didinti vertę X, o vertė adresu sumažėja – saugojimo įrenginys į tai nereaguoja. Dėl to signalo relės išėjime pasirodo signalas adresu-adresu 1 . Šiuo metu t signalas adresu-adresu 1 pasiekia signalinės relės negyvąją zoną ties n(taškas M 2), kuris veikia apversdamas pavarą. Po to saugoma vertė adresu 1 nustatoma iš naujo, o atminties įrenginys išsaugo naują vertę adresu 2 . Objekto įėjimo signalas X mažėja, o išėjimo signalas adresu didėja (trajektorija nuo taško M 2 Į M 3). Nes adresu visą laiką didėja, našumas atmintis nuolat seka pokyčius y.

Ryžiai. 4Ieškoti optimalaus SAO įsimenant ekstremumą:
A- objekto charakteristikos; b- keičiant objekto išvestį; V- signalas signalinės relės įėjime; G- keičiant objekto įvestį.
Taške M 3 sistema pasiekia kraštutinumą, bet mažėja X tęsiasi. Dėl to po taško M 3 prasmė adresu jau mažėja ir atmintis prisimena y Maks. Dabar prie signalinės relės įvesties SR vėl pasirodo skirtumo signalas y-y maks. Taške M 4 , Kada y 4 -y max = y n, suaktyvinama signalinė relė, apverčia pavarą ir iš naujo nustato išsaugotą vertę y max ir kt.
Virpesiai nustatomi aplink valdomos vertės ekstremumą. Iš pav. 4 matyti, kad įėjimo svyravimų periodas T in objektas yra 2 kartus didesnis už objekto išėjimo T out virpesių periodą. Signum relė apverčia IM, kai y=y max - y n. IM judėjimo kryptis po signalinės relės įjungimo priklauso nuo IM judėjimo krypties prieš signalinės relės įjungimą.
Įvertinus ŽŪR darbą su ekstremumo įsimenimu, matyti, kad jo pavadinimas ne visai tiksliai atspindi sistemos veikimo esmę. Atminties įrenginys fiksuoja objekto statinės charakteristikos ne ekstremumą (jo reikšmė valdiklio paleidimo momentu nežinoma). Atminties įrenginys nustato išvesties kiekio reikšmes adresu objektas kada adresu dideja.
Žingsnio tipo automatinės optimizavimo sistemos
Pakopinio ACS blokinė schema parodyta fig. 5. Išėjimo matavimas adresu objektas sistemoje atsiranda diskretiškai (už objekto išėjimo jutiklio yra impulsinis elementas T.Y 1), y. tam tikrais intervalais ∆ t(∆t- impulsinio elemento pasikartojimo periodas). Taigi impulsinis elementas konvertuoja kintantį išėjimo signalą adresu objektą į impulsų seką, kurios aukštis proporcingas reikšmėms adresu laiko momentais t=n∆t, vadinami paėmimo taškais. Pažymėkime vertybes adresu tuo metu t=n∆t per p. Vertybės ties n pateikiamas saugojimo įrenginio atmintyje (delsimo elementas). Saugojimo įrenginys tiekia palyginimo elementą ES ankstesnė vertė prie p- 1 . Įjungta ES atvyksta tuo pačiu metu y n. Lyginimo elemento išvestyje gaunamas skirtumo signalas ∆y n =y n - prie p- 1 Kitą akimirką t=(n+1) ∆t signalo paėmimo saugoma vertė prie p- 1 atstatomas iš atminties ir signalas išsaugomas esant n+ 1 , signalas y n ateina iš atmintisįjungta ES ir prie signalinės relės įėjimo SR pasirodo signalas ∆ esant n+ 1 = y n + 1 -y n .

Ryžiai. 5Diskretinio struktūra(steperis)SAO
Taigi, signalas, proporcingas prieaugiui ∆ adresu objekto išėjimas laiko intervalui ∆ t. Jei ∆ y>0 tada tokį judėjimą leidžia signalinė relė; jeigu ∆ adresu<0, tada įsijungia signalo relė ir pakeičia įėjimo signalo kryptį X.
Tarp signalo relės SR ir vykdomasis mechanizmas JUOS(5 pav.) įtrauktas dar vienas impulsinis elementas T.Y 2 (dirba sinchroniškai su T.Y 1), kuri atlieka periodinį maitinimo grandinės atidarymą JUOS, sustojus JUOSšiam laikui.
Tokiose ACS pavara paprastai keičia įėjimą X objektas žingsniais pagal pastovią reikšmę ∆x. Objekto įvesties signalą tikslinga keisti žingsniu greitai, kad pavaros judinimo vienu žingsniu laikas būtų pakankamai mažas. Tokiu atveju trikdžiai, kuriuos į objektą įveda pavara, artėja prie šuolių.
Taigi signalinė relė keičia sekančio žingsnio ∆ kryptį x n+ 1 pavara, jei reikšmė ∆ y n tampa mažesnis už nulį.
Panagrinėkime ekstremumo paieškos laiptinėje ACS su inerciniu objektu pobūdį. Tarkime, kad pradinė objekto būsena apibūdinama tašku M 1 nuo statinės priklausomybės y=f(x) (6a pav.). Tarkime, kad ekstremalus valdiklis yra pradėtas veikti tuo momentu t 1 o pavara padaro žingsnį ∆ X padidinti objekto įvesties signalą.

Ryžiai. 6Ieškoti atskirame SAO: A - objekto charakteristikos; b- pakeisti išvestį; V- pakeisti įvestį
Objekto išvesties signalas adresu o taip pat didėja. Po laiko ∆ t(laiku t 2) pavara žengia žingsnį ta pačia kryptimi, nes ∆ adresu 1 =y 2 -y 1>0. Šiuo metu t 3 pavara daro dar vieną žingsnį ant ∆ X ta pačia kryptimi, kadangi ∆ y 2 =y 3 -y 2 tuo metu yra didesnis už nulį ir pan t 5 augalo produkcijos prieaugis ∆ y 3 =y 5-y 4 , tampa mažesnis už nulį, suaktyvinama signalinė relė ir kitas žingsnis ∆ X pavara padarys objekto įvesties signalo mažėjimo kryptimi X ir tt
Žingsnis po žingsnio SAO, siekiant užtikrinti stabilumą, būtina, kad sistemos judėjimas į ekstremumą būtų nemonotoniškas.
Yra žingsnių CAO, adresu kurios vienu žingsniu pakeičia signalą įėjime ∆ X kintamasis ir priklauso nuo reikšmės y.
Automatinės optimizavimo sistemos su išvestiniu valdymu
Automatinės optimizavimo sistemos su išvestiniu valdymu naudoja ekstremalios statinės charakteristikos savybę, nei išvestinė dy/dx objekto įvesties signalo reikšme yra lygus nuliui x=x didmeninė prekyba(Žr. 7 pav.).

Ryžiai. 7Unimodalinės charakteristikos išvestinės kitimo grafikas
Vieno iš tokių ACS blokinė schema parodyta fig. 8. Objekto O įvesties ir išvesties signalų reikšmės tiekiamos į du diferenciatorius D 1 Ir D 2 , kurio išėjime atitinkamai gaunami signalai dx/dt Ir dy/dt. Išvestiniai signalai tiekiami į dalijimo įrenginį DU.

Ryžiai. 8ŽŪR struktūra su statinės charakteristikos išvestinės matavimu
Prie išėjimo DU gaunamas signalas dy/dx, kuris tiekiamas į stiprintuvą At su pelnu k 2. Signalas iš stiprintuvo išėjimo eina į pavarą JUOS su kintamu judėjimo greičiu, kurio reikšmė proporcinga stiprintuvo išėjimo signalui Ir. Pelnas JUOS lygus k 1 .
Jeigu statinė objekto charakteristika y=f(x) turi parabolės formą y=-kx 2 , tada SAO aprašomas tiesinėmis lygtimis (nesant perturbacijų), kadangi dy/dx=-2kx, o likusios sistemos grandys yra tiesinės. Loginis įtaisas judėjimo link ekstremumo krypčiai nustatyti tokioje sistemoje nenaudojamas, nes jis yra grynai tiesinis ir atrodo, kad ekstremumo reikšmė yra žinoma iš anksto (nes dy/dx= 0 jei x=xoit).
CAO įtraukimo į veiklą metu JUOS duodamas tam tikras signalas jį paleisti, kitaip dx/dt= 0 Ir dy/dt= 0 (jei nėra atsitiktinių perturbacijų). Po to ACS veikia kaip įprasta ACS, kurioje užduotis yra reikšmė dy/dx= 0.
Aprašyta sistema turi nemažai trūkumų, dėl kurių ji beveik netaikoma. Pirma, val dx/dt → 0 išvestinė dy/dt taip pat linkęs į nulį – ekstremumo radimo problema tampa neaiški. Antra, realūs objektai turi delsą, todėl reikia padalyti vienas iš kito ne tuo pačiu metu išmatuotas išvestis dy/dt Ir dx/dt, ir paslinko laike tiksliai pagal signalo delsos laiką objekte, o tai padaryti gana sunku. Trečia, loginio įrenginio (signomo relės) nebuvimas tokioje ACS lemia tai, kad tam tikromis sąlygomis sistema praranda savo veikimą. Tarkime, kad CAO pradėjo dirbti x
Be to, net jei tokia sistema pradiniu momentu pasislenka į ekstremalumą, ji praranda savo veikimą dėl savavališkai mažo statinės charakteristikos poslinkio be patikrinimo atbulinės eigos jungiklio.

Ryžiai. 9Optimizavimo sistema su objekto išvesties išvestinės matavimu:
A - sistemos struktūra; b- objekto charakteristikos; V- pakeisti išvestį; G- įvesties signalas d - keičiant objekto įvestį.
Apsvarstykite kitą ACS tipą su išvestiniu matavimu ir pavara JUOS pastovus judėjimo greitis, kurio blokinė schema parodyta fig. 9.
Panagrinėkime SAO ekstremumo paieškos pobūdį matuojant išvestinę su blokine schema, parodyta fig. 9, A.
Tegul inercinis reguliavimo objektas APIE(9 pav., a) turi statinę charakteristiką, parodytą fig. 9, b. ACS būsena ekstremalaus valdiklio įjungimo momentu nustatoma pagal įvesties signalų vertes x 1 ir išeiti adresu 1 - taškas M 1 ant statinio požymio.
Tarkime, kad ekstremalus valdiklis pradėjus jį eksploatuoti momentu t 1 keičia įvesties signalą X didėjimo kryptimi. Šiuo atveju signalas objekto išvestyje adresu pasikeis pagal statinę charakteristiką (9 pav., V), ir išvestinė dy/dt judant iš taško M 1 prieš M 2 mažėja (9 pav., G). Laiko momentu t 2 objekto išvestis pasieks ekstremalumą adresu max ir išvestinė dy/dt bus lygus nuliui. Dėl signalinės relės nejautrumo sistema toliau tols nuo ekstremumo. Tuo pačiu metu išvestinė dy/dt pakeičia ženklą ir tampa neigiamu. Šiuo metu t 3 , kai vertė dy/dt, likęs neigiamas, viršys signalinės relės negyvąją zoną ( dy/dt)H pavara apvers ir įvesties signalą X pradės mažėti. Objekto išvestis vėl pradės artėti prie ekstremumo ir išvestinės dy/dt tampa teigiamas, kai juda iš taško M 3 prieš M 4 (9 pav., V). Laiko momentu t 4, išvesties signalas vėl pasiekia ekstremumą, o išvestinė dy/dt=0.
Tačiau dėl signalinės relės nejautrumo sistemos judėjimas tęsis, išvestinė dy/dt tampa neigiamas ir taške M 5 vėl apvers ir t. t.
Šioje sistemoje yra diferencijuojamas tik objekto išėjimo signalas, kuris tiekiamas į signalinę relę SR. Nuo tada, kai sistema eina per ekstremumą, ženklas dy/dt pakitimų, tada norint rasti ekstremumą, reikia apsukti JUOS, kai išvestinė dy/dt tampa neigiamas ir viršija negyvąją juostą ( dy/dt)H signalo relė.
Į ženklą reaguojanti sistema dy/dt, pagal veikimo principą yra artimas žingsniuojančiam ACS, bet mažiau atsparus triukšmui.
Automatinės optimizavimo sistemos su pagalbine moduliacija
Kai kuriuose darbuose tokios automatinio optimizavimo sistemos vadinamos sistemomis su nuolatiniu paieškos signalu arba pagal A.A. terminologiją. Krasovskis tiesiog nuolatinėmis ekstremaliomis reguliavimo sistemomis.
Šiose sistemose statinės charakteristikos savybė naudojama objekto išėjimo signalo svyravimų fazei pakeisti, lyginant su objekto įvesties svyravimų faze 180°, kai objekto išėjimo signalas eina per ekstremumą (žr. 10 pav.). .

Ryžiai. 10Harmoninių virpesių perėjimo per unimodalinę charakteristiką pobūdis
Priešingai nei aukščiau aptartas ACS, sistemos su pagalbine moduliacija turi atskirus paieškos ir darbo judesius.
ACS su pagalbine moduliacija blokinė schema parodyta fig. 11.Įvesties signalas X objektas O su charakteristika y=f(x) yra dviejų komponentų suma: x=xo(t)+a nuodėmė ω 0 t, Kur A Ir ω 0 – pastovios reikšmės. Komponentas a nuodėmė ω 0 t yra bandomasis judėjimas ir gaminamas generatoriaus G, komponentas x o(t) yra darbininkų judėjimas. Pereinant prie ekstremumo, kintamasis komponentas a nuodėmė ω 0 t objekto įvesties signalas sukelia to paties dažnio kintamo komponento atsiradimą ω 0 =2π/T 0 objekto išvesties signale (žr. 10 pav.). Kintamąjį komponentą galima rasti grafiškai, kaip parodyta Fig. 10.

Ryžiai. vienuolikaSAO struktūra su pagalbine moduliacija
Akivaizdu, kad kintamoji signalo dedamoji objekto išėjime sutampa su kintamąja signalo komponente įėjime bet kuriai įvesties reikšmei, kai x 0 =x 1
Amplitudė A paieškos svyravimai turėtų būti nedideli, nes šie svyravimai pereina į objekto išvesties signalą ir lemia ekstremumo nustatymo klaidą.
Kiekio komponentas y, dažnis ω 0, atskirtas juostos pralaidumo filtru F 1 (11 pav.). Filtravimo užduotis F 1 yra nepraleisti pastovaus arba lėtai besikeičiančio komponento ir antrosios bei aukštesnės harmonikos komponentų. Idealiu atveju filtras turėtų praeiti tik dažnio komponentą ω 0.
Po filtro F 1 kintamasis kiekio komponentas y, dažnis ω 0 , paduodamas į dauginimo nuorodą MOH(sinchroninis detektorius). Pamatinė vertė taip pat tiekiama į daugiklio jungties įvestį v 1 =a nuodėmė ( ω 0 t + φ ). Fazė φ atskaitos įtampa v 1 parenkamas priklausomai nuo filtro išvesties fazės F 1 , nes filtras f1 įveda papildomą fazės poslinkį.
Išėjimo įtampos daugiklis u = vv 1 . Su verte x<x didmeninė prekyba
u = vv 1 = b nuodėmė ( ω 0 t+ φ ) a nuodėmė ( ω 0 t+ φ ) = ab nuodėmė 2 ( ω 0 t + φ )==ab/ 2 .
Kai signalo reikšmė įėjime x>X 0PT signalo reikšmė daugiklio jungties išėjime MOH yra:
u = vv 1 = b nuodėmė ( ω 0 t + φ + 180°) a nuodėmė ( ω 0 t + φ ) = - ab nuodėmė 2 ( ω 0 t + φ )= = - ab/ 2 .

Ryžiai. 12CAO paieškos su pagalbine moduliacija pobūdis:
A - objekto charakteristikos; b- svyravimų fazės pasikeitimas; V- harmoniniai svyravimai įėjime; G- bendras įvesties signalas; d - signalas daugiklio jungties išvestyje.
Po daugiklio signalo Ir taikomas žemo dažnio filtrui F 2 , kuris nepraleidžia kintamos signalo komponentės Ir. DC signalas ir=ir 1 po filtro F 2 taikomas relės elementui RE. Relės elementas valdo pavarą pastoviu važiavimo greičiu. Vietoj relės elemento grandinėje gali būti fazei jautrus stiprintuvas; tada pavara turės kintamą judėjimo greitį.
Ant pav. 12 paveiksle parodytas ekstremumo paieškos pobūdis ACS su pagalbine moduliacija, kurios blokinė schema parodyta fig. 11. Tarkime, kad pradinė sistemos būsena apibūdinama atitinkamai signalais objekto įėjime ir išėjime. X 1 Ir y 1 (taškas M 1 pav. 12a).
Nes taške M 1 prasmė x 1 <х опт tada įjungus ekstremalųjį valdiklį įėjimo ir išėjimo svyravimų fazės sutaps. Tarkime, kad šiuo atveju pastovus komponentas filtro išvestyje F 2 yra teigiamas ( ab/2>0), o tai atitinka judėjimą didėjant X, t.y. dx 0 /dt>0. Tokiu atveju ŽŪR judės ekstremumo link.
Jei išeities taškas M 2 , apibūdinantis sistemos padėtį ekstremalaus valdiklio įjungimo momentu, yra tokia, kad objekto įvesties signalas x>x opt (12 pav., a), tada objekto įėjimo ir išėjimo signalų virpesiai yra antifazėje. Dėl to pastovus komponentas išėjime F 2 bus neigiamas ( ab/2<0), что вызовет движение системы в сторону уменьшения X (dx 0 /dt<0 ). Tokiu atveju ŽŪR priartės prie ekstremumo.
Taigi, nepriklausomai nuo pradinės sistemos būsenos, ekstremumo paieška bus suteikta.
Sistemose su kintamo greičio pavara sistemos judėjimo į ekstremumą greitis priklausys nuo objekto išėjimo svyravimų amplitudės, o ši amplitudė nustatoma pagal įvesties signalo nuokrypį. X nuo vertės X didmeninė prekyba
Derinimas (ypatingas valdymas)
Ekstremalus valdymas gavo savo pavadinimą dėl konkretaus šio valdymo tikslo. Ekstremalaus valdymo uždavinys – pasiekti ekstremalų tikslą, t.y., ekstremizuojant (minimizuojant arba padidinant) kokį nors objekto rodiklį, kurio reikšmė priklauso nuo valdomų ir nekontroliuojamų objekto parametrų. Labai dažnas derinimo veiksmas lemia ekstremalią kontrolę.
Bet koks pritaikymas susideda iš tokios veiksmų sistemos, kuri užtikrina geriausią pasirinktinio objekto veikimo režimą, sukūrimą. Norint tai padaryti, būtina mokėti atskirti objekto būsenas ir jas kvalifikuoti taip, kad būtų žinoma, kuri iš dviejų būsenų turėtų būti laikoma „geresne“ už kitą. Tai reiškia, kad derinimo proceso metu turi būti nustatytas derinimo kokybės matas.
Pavyzdžiui, nustatant technologinį procesą, sugedusių dalių skaičius partijoje gali būti jos kokybės rodiklis; šiuo atveju proceso derinimo tikslas yra sumažinti atliekų kiekį. Tačiau ne visi ekstremalūs objektai leidžia taip paprastai kiekybiškai pateikti derinimo kokybės indeksą. Taigi, pavyzdžiui, derinant radiją ar televizorių, tokie derinimo kokybės matai gali būti garso kokybė ir kokybė
gauto perdavimo vaizdai. Čia jau gana sunku kiekybiškai įvertinti derinimo kokybės indeksą. Tačiau, kaip bus parodyta toliau, norint išspręsti ekstremalias kontrolės problemas, dažnai svarbu žinoti ne absoliučią kokybės rodiklio reikšmę, o jo prieaugio ženklą kontrolės procese. Tai reiškia, kad vadovybei pakanka žinoti, ar kokybės rodiklis padidėjo, ar sumažėjo. Radijo įrangos derinimo atveju žmogus gana gerai išsprendžia šią problemą, kai kalbama apie garso ar vaizdo kokybę.
Ryžiai. 1.3.1.
Taigi ateityje daroma prielaida, kad visada egzistuoja toks pritaikomo objekto informacijos apdorojimo algoritmas, leidžiantis kiekybiškai įvertinti šio objekto pritaikymo kokybę (arba šios kokybės pasikeitimo ženklą valdymo procese). ). Nustatymo kokybė matuojama skaičiumi Q , kuris priklauso nuo valdomų objekto parametrų būsenos:
. (1.3.1)
Nustatymo tikslas – šio rodiklio ekstremizavimas, t.y. problemos sprendimas
kur S raidė žymi leistino valdomų parametrų pasikeitimo sritį.
Ant pav. 1.3.1 parodyta ekstremalaus objekto blokinė schema. Jis suformuotas iš paties pritaikymo objekto su valdomomis įvestimis ir stebimais išėjimais, kurie neša informaciją apie objekto būseną, ir keitiklio, kuris, remdamasis gauta informacija, sudaro objekto skaliarinį kokybės rodiklį.
Ekstremalaus objekto pavyzdys yra radijo imtuvas ieškant stoties. Jei stoties girdimumas sumažėja (kaip sakoma, stotis „išplaukia“), tada norint gauti geriausią garso perdavimą, t.y. sureguliuoti imtuvą, reikia sureguliuoti grandinę. Šiuo atveju derinimo valdymas yra derinimo rankenėlės sukimosi krypties nustatymas. Stoties girdimumo lygis čia yra derinimo kokybės rodiklis. Jame nėra būtino

Ryžiai. 1.3.2.
valdymo informaciją, t.y. nenurodo, kuria kryptimi pasukti derinimo rankenėlę. Todėl norint gauti reikiamą informaciją, įvedama paieška - bandomasis derinimo rankenos judėjimas savavališka kryptimi, kuris suteikia papildomos ir reikalingos informacijos derinimui. Po to jau galima tiksliai pasakyti, kuria kryptimi reikia pasukti rankenėlę: jei girdimumas sumažėjo, reikia sukti į priešingą pusę, jei jau padidėjo, derinimo rankenėlę reikia pasukti ta pačia kryptimi, kad maksimalus girdimumas. Toks paprastas paieškos algoritmas, naudojamas derinant radijo imtuvą, kuris yra tipiškas ekstremalaus objekto pavyzdys.
Taigi kraštutinės kontrolės objektai išsiskiria informacijos trūkumu objekto išvestyje, savotiško informacinio „alkio“ buvimu. Norint gauti reikiamą informaciją ekstremalių objektų valdymo procese, būtina įvesti paiešką specialiai organizuotų bandomųjų žingsnių forma. Paieškos procesas išskiria derinimą ir ekstremalų valdymą iš visų kitų valdymo tipų.
Kaip „rimtesnį“ vieno parametro ekstremalaus objekto pavyzdį apsvarstykite antros eilės sekimo sistemos optimalaus slopinimo problemą (1.3.2 pav.). Vairavimo trikdymas taikomas šios servo sistemos įėjimui y*(t), apibrėžiantis y(t) išvesties būseną. Dėl elgesio pobūdžio y* (t) nieko nežinoma. Be to, trikdymo y*(t) statistinės savybės gali keistis netikėtai.

Ryžiai. 1.3.3.
Derinimo užduotis yra pasirinkti tokį slopinimą, kad ši servo sistema būtų optimali minimalaus veikimo požiūriu:
Dydis Q yra likutinės dispersijos įvertis o(t)=y(t)-y*(t) ant pagrindo T. Akivaizdu, kad reguliuojant servo sistemą, reikia stengtis sumažinti Q reikšmę.
Čia nurodyta servosistema veikia kaip reguliavimo objektas, išvesties informacija objekto veikimo kokybei nustatyti yra jos įvestis ir išvestis, o keitiklis formuoja kokybės rodiklį pagal formulę (1.3.3). Gautas ekstremalus objektas turi charakteristikas, parodytas Fig. 1.3.3. Priklausomybės Q ( O) išreiškia akivaizdų faktą, kad per mažas slopinimas yra toks pat blogas kaip ir per didelis slopinimas. Kaip matyti, charakteristika (1.3.3) turi ryškų kraštutinį pobūdį, kurio minimumas atitinka optimalų slopinimą O*. Be to, charakteristika priklauso nuo perturbacijos savybių y*(t). Todėl optimali būsena O*, sumažinti Q ( O), taip pat priklauso nuo vairavimo sutrikimo y*(t) pobūdžio ir kartu su juo besikeičiančių pokyčių. Tai verčia mus kreiptis į specialių automatinių derinimo sistemų kūrimą, kurios palaiko objektą sureguliuotoje (kraštutinėje) būsenoje, nepaisant trikdžių savybių. Šie automatiniai įrenginiai, išsprendžiantys derinimo problemą, vadinami ekstremaliais valdikliais arba optimizatoriais (t. y. objekto optimizavimo įrenginiais).
Išskirtinis ekstremalių objektų bruožas yra charakteristikos nemonotoniškumas (ekstremalumas), dėl kurio tokiems objektams valdyti neįmanoma naudoti valdymo metodo. Iš tiesų, stebint objekto išvesties reikšmę Q aukščiau pateiktame pavyzdyje (žr. 1.3.3 pav.), neįmanoma sukurti valdiklio, t.y. nustatyti, kuria kryptimi reikia keisti valdomą parametrą. O.Šis neapibrėžtumas visų pirma yra susijęs su dviejų situacijų galimybe ir išeitimi iš kurių į tikslą O* gaminamas visiškai priešingai (pirmuoju atveju reikėtų padidinti O, o antroje – sumažinti). Prieš valdant tokį objektą, būtina gauti papildomos informacijos – šiame pavyzdyje šią informaciją sudaro nustatant, kurioje charakteristikos šakoje yra objektas. Norėdami tai padaryti, pavyzdžiui, pakanka nustatyti kokybės indekso reikšmę kaimyniniame taške o +? O, Kur? O yra gana mažas nuokrypis.
Pažymėtina, kad derinimo proceso automatizavimas pateisinamas tik tuo atveju, jei laikui bėgant keičiasi ekstremali objekto charakteristika, t.y., kai klaidžioja kraštutinė būsena. Jei objekto charakteristika nesikeičia, tada ekstremumo paieškos procesas yra vienkartinio pobūdžio, todėl jam nereikia automatizavimo (pakanka stabilizuoti objektą kažkada apibrėžtoje ekstremalioje būsenoje).
Ant pav. 1.3.4 iliustracijai parodyta servo sistemos, kuri seka taikinio padėtį, ekstremalaus slopinimo valdymo blokinė schema. adresu(t), kurio elgesio pobūdis keičiasi.

Ryžiai. 1.3.4.
Čia ekstremalus valdiklis išsprendžia derinimo problemą, ty palaiko tokią slopinimo reikšmę O, kuris sumažina servo sistemos kokybės indeksą.
Optimizavimo problema dažniausiai susideda iš tokių valdymo veiksmų, kurie suteikia tam tikro kriterijaus valdymo objekto veikimo kokybei, suradimas ir palaikymas. Ši problema gali būti išspręsta automatiškai, pasitelkus ekstremalius valdiklius, kurie eksploatacijos metu ieško optimalių valdymo veiksmų. Sistemos, įgyvendinančios automatinę tam tikro objekto veiklos kokybės rodiklio ekstremumo paiešką ir priežiūrą, vadinamos ekstremaliomis valdymo sistemomis arba automatinio optimizavimo sistemomis. Automatinės optimizavimo sistemos, dėl jose įdiegtų optimalių valdymo paieškos algoritmų, turi nemažai privalumų, iš kurių pagrindinis yra jų gebėjimas normaliai funkcionuoti nepilnos a priori informacijos apie objektą ir jį veikiančių trikdžių sąlygomis. Ekstremalių valdymo sistemų naudojimas patartinas tais atvejais, kai objekto kokybės kriterijus turi ryškų ekstremumą ir yra galimybių ieškoti bei išlaikyti optimalų (ekstremalų) jo veikimo režimą. Ekstremalių valdymo sistemų teorijos ir technologijos raida dabar pasiekė reikšmingą lygį. Pramonė gamina tipinius ekstremalius valdiklius (automatinius optimizatorius) daugeliui technologinių procesų.
Ekstremalios valdymo sistemos yra viena iš labiausiai teoriškai ir praktiškai išplėtotų adaptyvių sistemų klasių. Ekstremalūs objektai vadinami automatinio valdymo objektais, kurių statinė charakteristika turi ekstremumą, kurio padėtis ir dydis nėra žinomi ir gali nuolat keistis.
Paprastai ekstremalus valdiklis ieško ir palaiko tokias objekto koordinačių reikšmes, kuriose išvestis ![]() pasiekia kraštutinę vertę. Toks objekto ir visos sistemos veikimo režimas yra optimalus kokybės kriterijaus minimumo arba maksimumo atžvilgiu. Lėktuvas gali būti vienmačio ekstremalaus objekto pavyzdys. Kilometro kuro sąnaudų priklausomybė y nuo skrydžio greičio x būdingas ekstremumo buvimas, kurio reikšmė ir padėtis keičiasi, kai dėl degalų sąnaudų keičiasi orlaivio svoris.
pasiekia kraštutinę vertę. Toks objekto ir visos sistemos veikimo režimas yra optimalus kokybės kriterijaus minimumo arba maksimumo atžvilgiu. Lėktuvas gali būti vienmačio ekstremalaus objekto pavyzdys. Kilometro kuro sąnaudų priklausomybė y nuo skrydžio greičio x būdingas ekstremumo buvimas, kurio reikšmė ir padėtis keičiasi, kai dėl degalų sąnaudų keičiasi orlaivio svoris.
Priklausomai nuo ekstremalių skaičiaus, objektai skirstomi į vienkraštį ir daugiaekstremumą, o pastaruoju atveju valdymo problema yra surasti globalų ekstremumą, t.y. didžiausias maksimumas arba mažiausias minimumas. Priklausomai nuo ekstremaliajame valdiklyje generuojamų valdymo veiksmų skaičiaus, išskiriamos vienmatės ir daugiamatės ekstremalios valdymo sistemos. Pagal darbo pobūdį laike ekstremalios sistemos gali būti nuolatinės ir atskiros. Priklausomai nuo paieškos signalo pobūdžio, išskiriamos ekstremalios sistemos su deterministiniais ir atsitiktiniais paieškos signalais.
Adaptyvių (pritaikomų) valdymo sistemų poreikis kyla dėl valdymo problemų komplikacijos, kai nėra praktinės galimybės detaliai ištirti ir aprašyti valdymo objektuose vykstančius procesus, esant kintantiems išoriniams trikdžiams. Adaptacijos efektas pasiekiamas dėl to, kad dalis procesų priėmimo, apdorojimo ir analizės funkcijų valdymo objekte atliekama sistemos veikimo metu. Toks funkcijų suskirstymas prisideda prie išsamesnio informacijos apie vykstančius procesus panaudojimo formuojant valdymo signalus ir gali žymiai sumažinti neapibrėžtumo įtaką valdymo kokybei. Taigi adaptyvusis valdymas būtinas tais atvejais, kai apriorinės informacijos apie sistemos veikimą neapibrėžtumo ar „neišsamumo“ įtaka tampa reikšminga norint užtikrinti nurodytą valdymo procesų kokybę. Šiuo metu yra tokia adaptyvių sistemų klasifikacija: savaime besireguliuojančios sistemos, sistemos su prisitaikymu specialiose fazėse ir mokymosi sistemos.
Savaime besireguliuojančių (ekstremalių) automatinių valdymo sistemų klasė yra plačiai paplitusi dėl gana paprasto techninio įgyvendinimo. Ši sistemų klasė atsiranda dėl to, kad daugelis valdymo objektų ar technologinių procesų turi ekstremalias (minimalus arba didžiausias) veikimo parametro priklausomybes nuo valdymo veiksmų. Tai galingi nuolatinės srovės elektros varikliai, technologiniai procesai chemijos pramonėje, įvairių tipų krosnys, orlaivių reaktyviniai varikliai ir kt. Panagrinėkime procesus, vykstančius krosnyje kuro degimo metu. Esant nepakankamam oro tiekimui, kuras krosnyje nesudega iki galo, o sukuriamos šilumos kiekis mažėja. Esant pertekliniam oro tiekimui, dalis šilumos pasišalina kartu su oru. Ir tik esant tam tikram oro ir šilumos kiekio santykiui, pasiekiama maksimali temperatūra krosnyje. Turboreaktyviniame orlaivio variklyje, keičiant degalų sąnaudas, galima gauti maksimalų oro slėgį už kompresoriaus, taigi ir didžiausią variklio trauką. Esant mažoms ir didelėms degalų sąnaudoms, sumažėja oro slėgis už kompresoriaus ir trauka. Be to, reikia pastebėti, kad ekstremalūs valdymo objektų taškai „plaukioja“ laike ir erdvėje.
Bendru atveju galime teigti, kad yra ekstremumas, o kokiomis valdymo veiksmo reikšmėmis jis pasiekiamas, a priori nežinoma. Esant tokioms sąlygoms, automatinė valdymo sistema veikimo metu turi sudaryti valdymo veiksmą, kuris objektą nukreipia į kraštutinę padėtį ir išlaiko jį tokioje būsenoje esant trikdžiams ir ekstremalių taškų „plaukiojančiam“ pobūdžiui. Šiuo atveju valdymo įtaisas yra ekstremalus valdiklis.
Pagal informacijos apie esamą objekto būseną gavimo būdą ekstremalios sistemos yra ne paieškos ir paieškos sistemos. Be paieškos sistemose geriausias valdymas nustatomas naudojant analitinius ryšius tarp norimos darbinio parametro reikšmės ir valdiklio parametrų. Lėtose paieškos sistemose ekstremumą galima rasti įvairiais būdais. Labiausiai paplitęs metodas yra sinchroninis aptikimas, kuris redukuojamas iki išvestinės dy/du įvertinimo, kur y yra valdymo objekto valdomas (darbinis) parametras, u – valdymo veiksmas. Sinchroninio aptikimo metodą iliustruojanti blokinė schema parodyta fig. 6.1.
Ryžiai. 6.1 Sinchroninio aptikimo struktūra
Valdymo objekto, turinčio ekstremalią priklausomybę y(u), įėjime kartu su valdymo veiksmu U taikomas nereikšmingas trikdymas reguliaraus periodinio signalo f(t) = gsinwt pavidalu, kur g yra didesnis nei nulis ir pakankamai mažas. Valdymo objekto išvestyje gauname y = y(u + gsinwt). Gauta y reikšmė padauginama iš signalo f(t). Dėl to signalas A įgis reikšmę
A =yf(t) = y(u+gsinwt)gsinwt.
Darant prielaidą, kad priklausomybė y(u) yra pakankamai sklandi funkcija, ji gali būti išplėsta į laipsnio eilutę ir pakankamai tiksliai apribota pirmaisiais plėtimosi nariais.
Y(u+gsinwt)=y(u)+gsinwt(dy/du) + 0,5g 2 sin 2 wt(d 2 y/du 2) + ….. .
Kadangi g reikšmė yra maža, galime nepaisyti aukštesnės eilės sąlygų ir gauti
Y(u + gsinwt) » y(u) + gsinwt(dy/du).
Tada dėl daugybos signalas A įgis reikšmę
A \u003d y (u) sinwt + g 2 sin 2 wt (dy / du).
Žemųjų dažnių filtro F išvestyje gauname signalą B
 .
.
Jei filtro laiko konstanta T pakankamai didelis, mes gauname

 .
.
Todėl signalas B filtro išėjime yra proporcingas išvestinei dy/du
XPM taikymo sritis neapsiriboja programinės įrangos kūrimu. Ekstremalus projektų valdymas bus efektyvus patyrusioms komandoms, kurios įgyvendina inovatyvius projektus, startuolius, dirba chaotiškomis, nenuspėjamomis sąlygomis.
Kas yra ekstremalus projektų valdymas?
XPM koncepcija buvo sukurta 2004 m. Tačiau laikyti jį vieninteliu kūrėju būtų nesąžininga. Dougą įkvėpė daugybė kitų autorių metodų:
- radikalaus projektų valdymo modelis Robas Thomsetas,
- APM Jimas Highsmithas,
- ekstremalios programavimo koncepcija Kentas Atgal.
DeCarlo investavo į Extreme Project Management chaoso teorija Ir sudėtingos prisitaikančios sistemos.
Chaoso teorija yra matematinė sritis, skirta netiesinių dinaminių sistemų, kurios tam tikromis sąlygomis yra veikiamos vadinamojo dinaminio chaoso, elgsenai apibūdinti ir tirti.
Sudėtinga prisitaikanti sistema yra daugelio tarpusavyje sąveikaujančių komponentų sistema, atitinkanti daugybę sąlygų (fraktalinė struktūra, gebėjimas prisitaikyti ir kt.). ŠMC pavyzdžiai yra miestas, ekosistemos, akcijų rinka.
Dougas ekstremalų projektų valdymą lygina su džiazu.
Nors džiazas gali skambėti chaotiškai, jis turi savo struktūrą, kurios dėka muzikantai turi galimybę improvizuoti ir kurti tikrus šedevrus.
Užuot sekę pramintu keliu, Ekstremaliame projektų valdyme projektų vadovai aptaria geriausią alternatyvą su klientu, eksperimentuoja, mokosi iš rezultatų ir taiko tas žinias kitame projekto cikle.
Viena iš kai kurių chaotiškų sistemų savybių,
kurie yra chaoso teorijos svarstymo objektai – „drugelio efektas“,
išpopuliarėjo Ray Bradbury „Thunder Came Out“
Brianas Warnhamas, knygos „“ autorius, apibūdino penkis žingsnius, kurių turi laikytis ekstremali projekto valdymo komanda, kad sėkmingai užbaigtų projektą:
- Matyti- aiškiai apibrėžti projekto viziją prieš pradedant ekstremalų projekto valdymą
- sukurti- įtraukti komandą į kūrybinio mąstymo procesą ir minčių šturmą kuriant ir atrenkant idėjas, kad būtų pasiekta nusistovėjusi projekto vizija
- Atnaujinti— skatinti komandą išbandyti savo idėjas diegiant naujoviškus sprendimus
- pervertinti- kūrimo ciklui artėjant į pabaigą, komanda turėtų iš naujo įvertinti savo darbą
- Paskirstyti– Baigus mokymus svarbu skleisti žinias ir jas pritaikyti būsimuose projekto etapuose, o taip pat ir apskritai naujiems projektams.
Kadangi žmonės yra ekstremalaus projektų valdymo priešakyje, tai taip pat lemia XPM projekto sėkmės matavimo specifiką:
- vartotojai patenkinti eiga ir tarpiniais pristatymais – jaučiasi, kad projektas juda tinkama linkme, nepaisant aplinkinio nestabilumo.
- vartotojai yra patenkinti galutiniu pristatymu.
- komandos nariai yra patenkinti savo gyvenimo kokybe dirbdami prie projekto. Jei paklausite jų, ar jie norėtų dirbti su panašiu projektu, dauguma jų atsakys „taip“.
XPM privalumai ir trūkumai
Tarp pagrindinių metodologijos privalumų reikėtų pažymėti:
- vientisumas– Nepaisant to, kad Extreme Project Management apima įvairius metodus, įrankius ir šablonus, jie prasmingi tik tada, kai taikomi visam projektui. Jūs, kaip projekto vadovas, galite matyti visą projektą kaip vieną sistemą, neanalizuoti atskirų jo dalių
- žmogaus orientacija– XPM akcentuojama projekto dinamika. Tai leidžia suinteresuotosioms šalims bendrauti ir bendrauti bei galiausiai patenkinti kliento poreikius.
- sutelkti dėmesį į verslą- Pasiekę rezultatą turėsite aiškią viziją, kuo projektas gali būti naudingas jūsų klientui. Komanda nuolat orientuojasi į ankstyvą ir dažną produktų pristatymą
- humanizmas yra vienas iš Ekstremalaus projektų valdymo principų. Tai reiškia, kad reikia atsižvelgti į projekte dalyvaujančių žmonių gyvenimo kokybę. Būdamas neatsiejama projekto dalimi, aistra darbui ir korporatyvinė dvasia stipriai veikia verslą, todėl dirbant su projektu svarbi fizinė ir moralinė komandos būklė
- tikrovė kaip pagrindas- ekstremalus projektų valdymas leidžia dirbti nenuspėjamoje, chaotiškoje aplinkoje. Jūs negalite pakeisti tikrovės, kad ji atitiktų projektą. Nutinka priešingai: pritaikote projektą prie išorinių veiksnių.
Buvo ir tam tikrų minusų. Juos galima suskaičiuoti:
- neapibrėžtumas- ši funkcija atkerta didelį projektų sektorių, pradedant nuo kritinės rizikos (kariniai objektai, atominės elektrinės, internetinės bankininkystės programos ir kt.), baigiant konkurso projektais su griežtai numatytu biudžetu, terminais ir kitomis projekto savybėmis;
- aukšti reikalavimai projekto komandos patirčiai ir kvalifikacijai- būtina nuolat prisitaikyti prie projekto aplinkos pokyčių, užmegzti efektyvų bendravimą tarpusavyje, suinteresuotomis šalimis ir projekto vadovu bei dirbti trumpomis iteracijomis (pastarasis aktualus IT sferai);
- poreikis keisti mąstymo būdą- skirtingai nei tradicinis projektų valdymas, kai darbas su projektu vyksta įprastais etapais, pagal patvirtintą planą ir vaidmenis, XPM komanda turi atsinaujinti ir būti pasiruošusi, kad neįmanoma visiškai kontroliuoti projekto;
- ilgalaikio planavimo neįmanoma– vakarykštis aktualumo planas nebus naujesnis nei praėjusio mėnesio naujienos. Kad komandos darbas būtų teisingas, kad būtų pasiektas projekto tikslas, būtina parodyti lankstumo ir organizuotumo savybes.

- projektas kuriamas dinamiškoje aplinkoje- nuolat keičiasi aplinkybės, greitis, reikalavimai;
- galimas pritaikymas bandymų ir klaidų metodas dirbant su projektu;
- Prie projekto dirba patyrusi komanda- skirtingai nei tradicinis projektų valdymas, priešakyje yra žmonės, o ne procesai;
- sukurti programą— per kūrimo gyvavimo ciklą programinė įranga dažniausiai sugeba pakeisti funkcionalumą arba išplėsti galimų platformų sąrašą. Kuo daugiau vartotojų naudojasi programine įranga, tuo daugiau pakeitimų galima atlikti, o tam puikiai tinka ekstremalus projektų valdymas.
- tai meta projektas- tai yra, kuri yra padalinta į daugybę mažų projektų. XPM šiuo atveju padės susidoroti su vėlavimu pradėti darbą;
- verslo savininkas yra pasirengęs dalyvauti projekto darbuose nuo pradžios iki pabaigos. Turi būti užmegzti ryšiai „projektų vadovas – verslininkas“,
« projekto vadovas— suinteresuotoji šalis,
„projekto vadovas – įmonės savininkas – suinteresuotoji šalis“.
Suinteresuotosios šalys – tai žmonės ir organizacijos, vienaip ar kitaip įtakojančios projektą. Tai ir aktyviai dalyvaujantys jame (projekto komanda, rėmėjas), ir tie, kurie naudos projekto rezultatus (užsakovas), ir asmenys, galintys daryti įtaką projektui, nors jame nedalyvauja (akcininkai, įmonės partnerės).
Ekstremalus projektų valdymas reikalauja, kad komanda greitai prisitaikytų prie neįprastos, nuolat besikeičiančios aplinkos, kurioje tenka dirbti. Todėl yra kelios pagrindinės taisyklės, kurios yra privalomos efektyviam ekstremalaus projektų valdymo naudojimui:
Tikras skirtumo pavyzdys klasikinis projektų valdymas nuo ekstremalus. Pirmajame pasiekiamas planuotas rezultatas, antrajame – norimas.
Ekstremalus projektų valdymas:
Vadovavimo, principų ir įrankių naudojimas siekiant sukurti vertę nepastovumo akivaizdoje Doug DeCarlo
#1 visiems, norintiems įvaldyti ekstremalų projektų valdymą. Remdamasis patirtimi su daugiau nei 250 projektų komandų, autorius parašė išsamų ekstremalaus projektų valdymo vadovą. Apie knygą šėlsta didžiausių tarptautinių organizacijų projektų vadovai: Management Solutions Group, Inc., Zero Boundary Inc., Guru Unlimited ir kt.
Efektyvus projektų valdymas: tradicinis, prisitaikantis, ekstremalus,
Trečiasis leidimas Robertas K. Vysotskis
Perskaitę kurią galite susidaryti idėją ne tik apie ekstremalų projektų valdymą, bet ir adaptyvų. Įdomiausia - kiekvieno skyriaus pabaigoje pateikiami klausimai, siekiant supaprastinti pateiktą medžiagą, kuri yra prisotinta realių skirtingų sričių projektų atvejų.
Radikalus projektų valdymas Robas Thomsettas
Ekstremalus projektų valdymas pristatomas nuo „A“ iki „Z“, išardoma kiekviena priemonė ir technika, kurios pagalba įgyvendinamas „Extreme Project Management“. Maksimali praktinė informacija su atvejų tyrimais.
Architektūros praktika: Ekstremalus projektų valdymas architektams
Ne knyga, bet, bet neįmanoma jos neįtraukti į atranką dėl išskirtinumo. Tai yra išsamus XPM naudojimo architektūroje ir statybose šaltinis. Deja, svetainės autorius jos nebeatnaujina, bet puslapis vis tiek tinka kaip cheat sheet.
Verdiktas
menas ir mokslas, kaip palengvinti ir valdyti minčių, emocijų ir veiksmų srautą taip, kad būtų galima pasiekti maksimalių rezultatų sunkiomis ir nestabiliomis sąlygomis.
XPM sėkmės priežastys, be kitų valdymo metodų, yra trijose srityse:
- Ekstremalus projektų valdymas leidžia tai padaryti nuolatinis savęs taisymas ir savęs tobulinimas realiu laiku;
- XPM daugiausia dėmesio skiria apibrėžiant ir sekant projekto misiją ugdant pasitikėjimą suinteresuotosiomis šalimis ir projekto komanda;
- žmogaus orientacija, humanizmas ir žmonių prioritetas prieš procesus kaip pagrindiniai metodologijos bruožai.