1 of 68
Presentation on the topic: Rotational motion of a rigid body
slide number 1

Description of the slide:
slide number 2

Description of the slide:
The rotational motion of a rigid body or system of bodies is such a motion in which all points move along circles whose centers lie on one straight line, called the axis of rotation, and the planes of the circles are perpendicular to the axis of rotation. The rotational motion of a rigid body or system of bodies is such a motion in which all points move along circles whose centers lie on one straight line, called the axis of rotation, and the planes of the circles are perpendicular to the axis of rotation. The axis of rotation can be located inside the body and outside it, and depending on the choice of the reference system, it can be either moving or stationary. Euler's rotation theorem states that any rotation of three-dimensional space has an axis.
slide number 3

Description of the slide:
Kinematics of rotary motion……………………….…….4 Kinematics of rotary motion……………………….…….4 Dynamics of rotary motion………………………………. 13 The basic equation of the dynamics of rotational motion……14 Dynamics of arbitrary motion………………………………..……….26 Conservation laws……………………………………………… ……….....30 Law of conservation of angular momentum……………………………………….31 Kinetic energy of a rotating body……………………………….52 Law of conservation of energy… ……………………….………………………….…57 Conclusion…………………………………………………………………. .…..61 Information materials used ..…………...66
slide number 4

Description of the slide:
slide number 5

Description of the slide:
slide number 6

Description of the slide:
slide number 7

Description of the slide:
slide number 8

Description of the slide:
slide number 9

Description of the slide:
slide number 10

Description of the slide:
Example: plane-parallel movement of a wheel without slipping on a horizontal surface. Wheel rolling can be represented as the sum of two movements: translational motion at the speed of the center of mass of the body and rotation about an axis passing through the center of mass. Example: plane-parallel movement of a wheel without slipping on a horizontal surface. Wheel rolling can be represented as the sum of two movements: translational motion at the speed of the center of mass of the body and rotation about an axis passing through the center of mass.
slide number 11

Description of the slide:
The kinematics of the movement of the Palace Bridge in St. Petersburg was captured by the method of sequential shooting. Exposure 6 seconds. What information about the movement of the bridge can be extracted from the photo? Analyze the kinematics of its movement. The kinematics of the movement of the Palace Bridge in St. Petersburg was captured by the method of sequential shooting. Exposure 6 seconds. What information about the movement of the bridge can be extracted from the photo? Analyze the kinematics of its movement.
slide number 12

Description of the slide:
Kikoin A.K. Kinematic formulas for rotational motion. "Quantum", 1983, No. 11. Kikoin A.K. Kinematic formulas for rotational motion. "Quantum", 1983, No. 11. Fistul M. Kinematics of plane-parallel motion. "Quantum", 1990, No. 9 Chernoutsan A.I. When everything revolves around... "Kvant", 1992, No. 9. Chivilev V., Movement in a circle: uniform and uneven. "Quantum", 1994, No. 6. Chivilev V.I. Kinematics of rotational motion. "Quantum", 1986, No. 11.
slide number 13

Description of the slide:
slide number 14

Description of the slide:
slide number 15

Description of the slide:
The dynamics of the translational motion of a material point operates with such concepts as force, mass, momentum. The dynamics of the translational motion of a material point operates with such concepts as force, mass, momentum. The acceleration of a translationally moving body depends on the force acting on the body (the sum of the acting forces) and the mass of the body (Newton's second law):
slide number 16

Description of the slide:
slide number 17

Description of the slide:
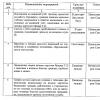
Design and principle of operation of the device Design and principle of operation of the device Investigation of the dependence of the angular acceleration of disk rotation on the moment of the acting force: on the value of the acting force F at a constant value of the arm of the force relative to the given axis of rotation d (d = const); from the shoulder of the force relative to a given axis of rotation at a constant operating force(F = const); from the sum of the moments of all forces acting on the body about a given axis of rotation. Investigation of the dependence of angular acceleration on the properties of a rotating body: on the mass of a rotating body at a constant moment of forces; on the distribution of mass relative to the axis of rotation at a constant moment of forces. Experimental results:
slide number 18

Description of the slide:
The fundamental difference is that mass is invariant and does not depend on how the body is moving. The moment of inertia changes when the position of the axis of rotation or its direction in space changes. The fundamental difference is that mass is invariant and does not depend on how the body is moving. The moment of inertia changes when the position of the axis of rotation or its direction in space changes.
slide number 19

Description of the slide:
slide number 20

Description of the slide:
slide number 21

Description of the slide:
The theorem on the transfer of axes of inertia (Steiner): the moment of inertia of a rigid body about an arbitrary axis I is equal to the sum of the moment of inertia of this body I0 about the axis passing through the center of mass of the body parallel to the axis under consideration, and the product of the body mass m and the square of the distance d between the axes: transfer of the axes of inertia (Steiner): the moment of inertia of a rigid body about an arbitrary axis I is equal to the sum of the moment of inertia of this body I0 about the axis passing through the center of mass of the body parallel to the considered axis, and the product of the body mass m and the square of the distance d between the axes:
slide number 22

Description of the slide:
How do the moments of inertia of the cubes about the axes OO and O'O' differ? How do the moments of inertia of the cubes about the axes OO and O'O' differ? Compare the angular accelerations of the two bodies shown in the figure, with the same action of the moments of external forces on them.
slide number 23

Description of the slide:
Task: A ball and a solid cylinder of the same mass roll down a smooth inclined plane. Which of these bodies Problem: A ball and a solid cylinder of the same mass roll down a smooth inclined plane. Which of these bodies will roll faster? Note: The equation of the dynamics of the rotational motion of the body can be written not only relative to a fixed or uniformly moving axis, but also relative to an axis moving with acceleration, provided that it passes through the center of mass of the body and its direction in space remains unchanged.
slide number 24

Description of the slide:
The problem of the rolling of a symmetrical body on an inclined plane. The problem of the rolling of a symmetrical body on an inclined plane. With respect to the axis of rotation passing through the center of mass of the body, the moments of the forces of gravity and the reaction of the support are equal to zero, the moment of the friction force is equal to M = Ftr. Make up a system of equations, applying: the basic equation of the dynamics of rotational motion for a rolling body; Newton's second law for the translational motion of the center of mass.
slide number 25

Description of the slide:
The moment of inertia of a ball and a solid cylinder, respectively, are equal The moment of inertia of a ball and a solid cylinder, respectively, are equal Equation of rotational motion: Equation of Newton's second law for the translational motion of the center of mass Acceleration of the ball and cylinder when rolling down an inclined plane, respectively, are equal: ab > ac, therefore, the ball will roll faster than the cylinder. Generalizing the result obtained to the case of rolling of symmetrical bodies from an inclined plane, we find that a body with a smaller moment of inertia will roll faster.
slide number 26

Description of the slide:
slide number 27

Description of the slide:
Arbitrary motion of a rigid body can be decomposed into translational motion, in which all points of the body move at the speed of the center of mass of the body, and rotation around the center of mass. Arbitrary motion of a rigid body can be decomposed into translational motion, in which all points of the body move at the speed of the center of mass of the body, and rotation around the center of mass.
slide number 28

Description of the slide:
The sequential shooting mode allows illustrating the theorem on the movement of the center of mass of the system: when the shutter is released, several images can be captured in one second. When such a series is combined, athletes performing tricks and animals in motion turn into a dense line of twins. The sequential shooting mode allows illustrating the theorem on the movement of the center of mass of the system: when the shutter is released, several images can be captured in one second. When such a series is combined, athletes performing tricks and animals in motion turn into a dense line of twins.
slide number 29

Description of the slide:
slide number 30

Description of the slide:
slide number 31

Description of the slide:
slide number 32

Description of the slide:
slide number 33

Description of the slide:
The law of conservation of angular momentum - one of the most important fundamental laws of nature - is a consequence of the isotropy of space (symmetry with respect to rotations in space). The law of conservation of angular momentum - one of the most important fundamental laws of nature - is a consequence of the isotropy of space (symmetry with respect to rotations in space). The law of conservation of angular momentum is not a consequence of Newton's laws. The proposed approach to the conclusion of the law is of a private nature. With a similar algebraic form of writing, the laws of conservation of momentum and angular momentum as applied to one body have a different meaning: in contrast to the speed of translational motion, the angular velocity of rotation of the body can change due to a change in the moment of inertia of the body I by internal forces. The law of conservation of angular momentum is fulfilled for any physical systems and processes, not only mechanical ones.
slide number 34

Description of the slide:
The angular momentum of a system of bodies remains unchanged for any interactions within the system, if the resulting moment of external forces acting on it is equal to zero. The angular momentum of a system of bodies remains unchanged for any interactions within the system, if the resulting moment of external forces acting on it is equal to zero. Consequences from the law of conservation of angular momentum in the event of a change in the rotation speed of one part of the system, the other will also change the rotation speed, but in the opposite direction in such a way that the angular momentum of the system does not change; if the moment of inertia of a closed system changes during rotation, then its angular velocity also changes in such a way that the angular momentum of the system remains the same in the case when the sum of the moments of external forces about a certain axis is equal to zero, the angular momentum of the system about the same axis remains constant . Experimental verification. Experiments with Zhukovsky's bench Limits of applicability. The law of conservation of angular momentum is fulfilled in inertial frames of reference.
slide number 35

Description of the slide:
The Zhukovsky bench consists of a frame with a support ball bearing in which a round horizontal platform rotates. The Zhukovsky bench consists of a frame with a support ball bearing in which a round horizontal platform rotates. The bench with the person is brought into rotation, inviting him to spread his arms with dumbbells to the sides, and then sharply press them to his chest.
slide number 36

Description of the slide:
slide number 37

Description of the slide:
The law of conservation of angular momentum is fulfilled if: The law of conservation of momentum is fulfilled if: the sum of the moments of external forces is equal to zero (the forces may not be balanced in this case); the body moves in a central force field (in the absence of other external forces; relative to the center of the field) The law of conservation of angular momentum is applied: when the nature of the change over time of the forces of interaction between parts of the system is complex or unknown; about the same axis for all moments of impulse and forces; both fully and partially isolated systems.
slide number 38

Description of the slide:
A remarkable feature of rotational motion is the property of rotating bodies in the absence of interactions with other bodies to keep unchanged not only the angular momentum, but also the direction of the axis of rotation in space. A remarkable feature of rotational motion is the property of rotating bodies in the absence of interactions with other bodies to keep unchanged not only the angular momentum, but also the direction of the axis of rotation in space. Daily rotation Earth. Gyroscopes Helicopter Circus rides Ballet Figure skating Gymnastics (somersaults) Diving Sports
slide number 39

Description of the slide:
The constant reference point for travelers on the surface of the Earth is the North Star in the constellation Ursa Major. The axis of rotation of the Earth is directed approximately to this star, and the apparent immobility of the North Star over the centuries clearly proves that during this time the direction of the axis of rotation of the Earth in space remains unchanged. The constant reference point for travelers on the surface of the Earth is the North Star in the constellation Ursa Major. The axis of rotation of the Earth is directed approximately to this star, and the apparent immobility of the North Star over the centuries clearly proves that during this time the direction of the axis of rotation of the Earth in space remains unchanged.
slide number 40

Description of the slide:
A gyroscope is any heavy symmetrical body rotating around the axis of symmetry with a high angular velocity. A gyroscope is any heavy symmetrical body rotating around the axis of symmetry with a high angular velocity. Examples: bicycle wheel; hydroelectric turbine; propeller. Properties of a free gyroscope: keeps the position of the axis of rotation in space; impact resistant; inertialess; has an unusual reaction to the action of an external force: if the force tends to rotate the gyroscope about one axis, then it rotates around the other, perpendicular to it - it precesses. Has a wide range of applications.
slide number 41

Description of the slide:
slide number 42

Description of the slide:
Many features of the behavior of a helicopter in the air are dictated by the gyroscopic effect. A body untwisted along an axis tends to keep the direction of this axis unchanged. Many features of the behavior of a helicopter in the air are dictated by the gyroscopic effect. A body untwisted along an axis tends to keep the direction of this axis unchanged. Turbine shafts, bicycle wheels, and even elementary particles, such as electrons in an atom, have gyroscopic properties.
slide number 43

Description of the slide:
slide number 44

Description of the slide:
Athletes and ballet dancers use the property of the angular velocity of rotation of the body to change due to the action of internal forces: when, under the influence of internal forces, a person changes his posture, pressing his arms to the body or spreading them apart, he changes the moment of momentum of his body, while the moment of momentum is preserved as magnitude and direction, so the angular velocity of rotation also changes. Athletes and ballet dancers use the property of the angular velocity of rotation of the body to change due to the action of internal forces: when, under the influence of internal forces, a person changes his posture, pressing his arms to the body or spreading them apart, he changes the moment of momentum of his body, while the moment of momentum is preserved as magnitude and direction, so the angular velocity of rotation also changes.
slide number 45

Description of the slide:
A skater who rotates around a vertical axis, at the beginning of the rotation, brings his hands closer to the body, thereby reducing the moment of inertia and increasing the angular velocity. At the end of the rotation, the reverse process occurs: when the arms are spread, the moment of inertia increases and the angular velocity decreases, which makes it easy to stop the rotation and proceed to another element. A skater who rotates around a vertical axis, at the beginning of the rotation, brings his hands closer to the body, thereby reducing the moment of inertia and increasing the angular velocity. At the end of the rotation, the reverse process occurs: when the arms are spread, the moment of inertia increases and the angular velocity decreases, which makes it easy to stop the rotation and proceed to another element.
slide number 46

Description of the slide:
The gymnast performing somersaults, in the initial phase, bends his knees and presses them to his chest, thereby reducing the moment of inertia and increasing the angular velocity of rotation around the horizontal axis. At the end of the jump, the body straightens, the moment of inertia increases, and the angular velocity decreases. The gymnast performing somersaults, in the initial phase, bends his knees and presses them to his chest, thereby reducing the moment of inertia and increasing the angular velocity of rotation around the horizontal axis. At the end of the jump, the body straightens, the moment of inertia increases, and the angular velocity decreases.
slide number 47

Description of the slide:
The push experienced by the jumper into the water, at the moment of separation from the flexible board, “twirls” it, giving the initial stock of angular momentum relative to the center of mass. The push experienced by the jumper into the water, at the moment of separation from the flexible board, “twirls” it, giving the initial stock of angular momentum relative to the center of mass. Before entering the water, having made one or more revolutions with a high angular velocity, the athlete extends his arms, thereby increasing his moment of inertia and, consequently, reducing his angular velocity.
slide number 48

Description of the slide:
The rotation is stable with respect to the main axes of inertia, which coincide with the axes of symmetry of the bodies. The rotation is stable with respect to the main axes of inertia, which coincide with the axes of symmetry of the bodies. If at the initial moment the angular velocity deviates slightly in the direction from the axis, which corresponds to the intermediate value of the moment of inertia, then in the future the angle of deviation rapidly increases, and instead of a simple uniform rotation around a constant direction, the body begins to perform a seemingly random somersault.
slide number 49

Description of the slide:
Spin plays important role in team sports: tennis, billiards, baseball. The amazing “dry leaf” kick in football is characterized by a special flight path of a spinning ball due to the occurrence lifting force in the oncoming air flow (Magnus effect). Spin plays an important role in team sports: tennis, billiards, baseball. An amazing “dry leaf” kick in football is characterized by a special flight path of a rotating ball due to the occurrence of lift in the oncoming air flow (Magnus effect).
slide number 50

Description of the slide:
The Hubble Space Telescope floats freely in space. How can you change its orientation so as to aim at objects important to astronomers? The Hubble Space Telescope floats freely in space. How can you change its orientation so as to aim at objects important to astronomers?
slide number 51

Description of the slide:
Why does a cat always land on its feet when it falls? Why does a cat always land on its feet when it falls? Why is it difficult to maintain balance on a stationary two-wheeled bicycle, and not at all difficult when the bicycle is moving? How will the cockpit of a helicopter in flight behave if, for some reason, the tail rotor stops working?
slide number 54

Description of the slide:
In planar motion, the kinetic energy of a rigid body is equal to the sum of the kinetic energy of rotation around an axis passing through the center of mass and the kinetic energy of translational motion of the center of mass: In planar motion, the kinetic energy of a rigid body is equal to the sum of the kinetic energy of rotation around an axis passing through the center of mass and translational energy of the center of mass: The same body can also have potential energy ЕP if it interacts with other bodies. Then the total energy is:
slide number 55

Description of the slide:
slide number 56

Description of the slide:
The kinetic energy of any system of material points is equal to the sum of the kinetic energy of the entire mass of the system, mentally concentrated in its center of mass and moving with it, and the kinetic energy of all material points of the same system in their relative motion with respect to the translationally moving coordinate system with the origin in the center wt. The kinetic energy of any system of material points is equal to the sum of the kinetic energy of the entire mass of the system, mentally concentrated in its center of mass and moving with it, and the kinetic energy of all material points of the same system in their relative motion with respect to the translationally moving coordinate system with the origin in the center wt.
Description of the slide:
The dependence of the kinetic energy of rotation on the moment of inertia of bodies is used in inertial batteries. The dependence of the kinetic energy of rotation on the moment of inertia of bodies is used in inertial batteries. The work done due to the kinetic energy of rotation is equal to: Examples: potter's wheels, massive wheels of water mills, flywheels in internal combustion engines. Flywheels used in rolling mills have a diameter of more than three meters and a mass of more than forty tons.
slide number 62

Description of the slide:
Problems for self-study Problems for self-solving A ball rolls down an inclined plane of height h = 90 cm. What linear velocity will the center of the ball have at the moment when the ball rolls down the inclined plane? Solve the problem in dynamic and energetic ways. A homogeneous ball of mass m and radius R rolls down without slipping on an inclined plane making an angle α with the horizon. Find: a) the values of the friction coefficient at which there will be no slip; b) the kinetic energy of the ball t seconds after the start of motion.
slide number 63

Description of the slide:
slide number 64

Description of the slide:
“It has long been customary that in a capacitor, this charge keeper, there is an electric field, and in a coil with current, a magnetic field. But to hang a capacitor in a magnetic field - such a thing could only come to the mind of a very Curious child. And not in vain - he learned something new ... It turns out, - the Curious child said to himself, - the electromagnetic field has the attributes of mechanics: the density of momentum and angular momentum! (Stasenko A.L. Why should a capacitor be in a magnetic field? Kvant, 1998, No. 5). “It has long been customary that in a capacitor, this charge keeper, there is an electric field, and in a coil with current, a magnetic field. But to hang a capacitor in a magnetic field - such a thing could only come to the mind of a very Curious child. And not in vain - he learned something new ... It turns out, - the Curious child said to himself, - the electromagnetic field has the attributes of mechanics: the density of momentum and angular momentum! (Stasenko A.L. Why should a capacitor be in a magnetic field? Kvant, 1998, No. 5). “And what do they have in common - rivers, typhoons, molecules?...” (Stasenko A.L. Rotation: rivers, typhoons, molecules. Kvant, 1997, No. 5).
slide number 65

Description of the slide:
Read books: Orir D. Popular Physics. M.: Mir, 1964, or Cooper L. Physics for everyone. M .: Mir, 1973. Vol. 1. From them you will learn a lot of interesting things about the movement of planets, wheels, spinning tops, the rotation of a gymnast on the crossbar and ... why a cat always falls on its paws. Read books: Orir D. Popular Physics. M.: Mir, 1964, or Cooper L. Physics for everyone. M .: Mir, 1973. Vol. 1. From them you will learn a lot of interesting things about the movement of planets, wheels, spinning tops, the rotation of a gymnast on the crossbar and ... why a cat always falls on its paws. Read in "Quantum": Vorobyov I. Unusual journey. (№2, 1974) Davydov V. How do the Indians throw the tomahawk? (№ 11, 1989) Jones D., Why the bicycle is stable (№12, 1970) Kikoin A. Rotational motion of bodies (№1, 1971) Krivoshlykov S. Mechanics of a rotating top. (№ 10, 1971) Lange W. Why the book tumbles (N3,2000) Thomson JJ On the dynamics of a golf ball. (№8, 1990) Use the educational resources of the Internet: http://physics.nad.ru/Physics/Cyrillic/mech.htm http://howitworks.iknowit.ru/paper1113.html http://class-fizika. narod.ru/9_posmotri.htm and others.
slide number 66

Description of the slide:
Study the laws of rotational motion using a simulator (Java applet) Study the laws of rotational motion using a simulator (Java applet) FREE ROTATION OF A SYMMETRIC TOP FREE ROTATION OF A HOMOGENEOUS CYLINDER (SYMMETRIC TOP) FORCED PRECESSION OF A GYRO educational resources of the Internet. Perform an experimental study "Determination of the position of the center of mass and moments of inertia of the human body relative to the anatomical axes." Be observant!
slide number 67

Description of the slide:
slide number 68

Description of the slide:
Textbook for grade 10 with an in-depth study of physics, edited by A. A. Pinsky, O. F. Kabardin. M .: "Enlightenment", 2005. Textbook for grade 10 with in-depth study of physics, edited by A. A. Pinsky, O. F. Kabardin. M.: "Enlightenment", 2005. Optional course in physics. O. F. Kabardin, V. A. Orlov, A. V. Ponomareva. M .: "Enlightenment", 1977 Remizov A. N. Physics course: Proc. for universities / A. N. Remizov, A. Ya. Potapenko. M.: Bustard, 2004. Trofimova T. I. Course of physics: Proc. allowance for universities. M.: graduate School, 1990. http://ru.wikipedia.org/wiki/ http://elementy.ru/trefil/21152 http://www.physics.ru/courses/op25part1/content/chapter1/section/paragraph23/theory. html Physclips. Multimedia introduction to physics. http://www.animations.physics.unsw.edu.au/jw/rotation.htm and others. Illustrative materials from the Internet were used in the design for educational purposes.
Kinematics is a branch of mechanics in which the movement of material bodies is studied without taking into account the causes that cause it. Types of movement: – – Translational – – Rotational – – Plane-parallel – – Spherical – – Complex Speed – – Acceleration Types of motion: – – Translational – – Rotational – – Plane-parallel – – Spherical – – Complex Kinematic characteristics: – – Position of a point (body) – – Trajectory – – Speed – – Acceleration movement of points (bodies) - Knowing the law of motion of a point (body), establish methods for determining all quantities characterizing a given movement. quantities characterizing this movement
Chapter 1 Kinematics of a point § 1. Methods for specifying motion § 2. Velocity and acceleration of a point 2.1. Speed at a vector way of the task of movement of a point 2.2. Acceleration with the vector method of specifying the movement of a point 2.3. Velocity with the coordinate method of specifying the movement of a point 2.4. Acceleration with the coordinate method of specifying the movement of a point 2.5. Speed at a natural way of the task of movement of a point 2.6. Acceleration with a natural way of specifying the motion of a point § 3. Special cases of motion of a point § 1. Ways of specifying motion § 2. Velocity and acceleration of a point 2.1. Speed at a vector way of the task of movement of a point 2.2. Acceleration with the vector method of specifying the movement of a point 2.3. Velocity with the coordinate method of specifying the movement of a point 2.4. Acceleration with the coordinate method of specifying the movement of a point 2.5. Speed at a natural way of the task of movement of a point 2.6. Acceleration with a natural method of specifying the motion of a point § 3. Particular cases of motion of a point

The movement of a point with respect to the chosen reference system is considered given if a method is known by which it is possible to determine the position of the point at any moment in time The point, moving in space, describes a curve called a trajectory The movement of a point with respect to the chosen reference system is considered given if it is known a method by which it is possible to determine the position of a point at any moment in time A point, moving in space, describes a curve called a trajectory § 1. Methods for specifying movement





M M O + - s (t) Natural (trajectory) way of setting the movement set the trajectory of the movement origin the direction of the distance counting the law of movement of the point along the trajectory s = s(t) set the trajectory of the movement origin the direction of the distance counting the law of the movement of the point along the trajectory s = s(t)

Methods for specifying motion Vector method for specifying motion Coordinate method for specifying motion Natural (trajectory) method for specifying motion Vector method for specifying motion Coordinate method for specifying motion Natural (trajectory) method for specifying motion


The speed of a point (vector quantity) is one of the main kinematic characteristics of the movement of a point Under the average speed of a point (in modulus and direction) is understood as a value equal to the ratio of the displacement vector to the time interval during which this movement occurred The speed of the point in this moment of time is called the instantaneous speed of a point The speed of a point (vector quantity) is one of the main kinematic characteristics of the movement of a point Under the average speed of a point (in modulus and direction) is understood as a value equal to the ratio of the displacement vector to the time interval during which this movement occurred The speed of the point at a given time is called the instantaneous speed of the point Speed





2.5. Speed with the natural method of specifying the movement of a point M M M1M1 M1M1 O O concavity of the trajectory - the normal to the trajectory lies in the contiguous plane and is directed towards the concavity of the trajectory - perpendicular to the first two, so that it forms a right triple of vectors - perpendicular to the first two, so that it forms a right triple of vectors - curvilinear (arc) coordinate




Always positive, because always directed towards the concavity of the trajectory always positive, because always directed towards the concavity of the trajectory shows the change in speed in magnitude shows the change in speed in magnitude shows the change in speed in direction shows the change in speed in direction M M O O

§ 3. Special cases of point motion Uniform rectilinear motion, when Uniform curvilinear motion, when Р uniform rectilinear motion, when Uniform curvilinear motion, when Uniform motion, if always Uniform motion, if always in case in case In this case, the equation of motion In this case equation of motion either if or if then instantaneous stop, i.e. then an instant stop, i.e. speed changes direction - inflection point speed changes direction - inflection point and means and means

The movement is accelerated, when the movement is slow, when the movement is accelerated, when the movement is slow, when If If If at some point in time at some point in time then movement with acceleration then movement with acceleration we have an extremum, i.


Electronic lectures on sections of classical and
relativistic mechanics
6 lectures
(12 classroom hours)
Section 1. Classical mechanics
Lecture Topics1.
2.
3.
4.
5.
6.
Kinematics of translational motion.
Kinematics of rotational motion.
Dynamics of translational motion.
Dynamics of rotational motion.
Work, energy.
Conservation laws.
Topic 1. Kinematics of translational motion
Lecture plan1.1. Basic concepts of kinematics
1.2. Movement, speed, acceleration.
1.3. Inverse problem of kinematics.
1.4. Tangential and normal accelerations.
1.1. Basic concepts of kinematics
Mechanical movement is the process of movingbodies or their parts relative to each other.
Mechanical, like any other, movement
takes place in space and time.
Space and time are the most complex physical and
philosophical categories.
In the course of the development of physics and philosophy, these concepts
have undergone significant changes. I. Newton created classical mechanics.
He postulated that time and space
absolute.
Absolute space and absolute time are not
are interconnected.
Classical mechanics ascribes to the absolute
space and absolute time
certain properties. Absolute space
- three-dimensional (has three dimensions),
- continuous (its points can be arbitrarily
close to each other)
- Euclidean (its geometry is described by the geometry
Euclid),
- homogeneous (it has no privileged points),
- isotropic (it has no privileged
directions). Absolute time
- one-dimensional (has one dimension);
- continuously (two of its moments can be as long as
arbitrarily close to each other);
- homogeneous (it has no privileged
moments);
- anisotropic (flows in only one direction). At the beginning of the 20th century, classical mechanics underwent
fundamental revision.
As a result, the greatest theories of our
time - the theory of relativity and quantum
Mechanics.
Theory of relativity (relativistic mechanics)
describes the motion of macroscopic bodies when they
the speed is comparable to the speed of light.
Quantum mechanics describes motion
micro-objects. The theory of relativity established the following
positions about space and time.
Space and time:
- are not independent objects;
are the forms of existence of matter;
- are not absolute, but relative;
- are inseparable from each other;
- are inseparable from matter and its motion. Mechanics
classical
Theory
relativity
ONE HUNDRED
general relativity
quantum Classical mechanics studies macroscopic
bodies moving at low speeds.
Special relativity studies
speeds (of the order C = 3 10 8 m/s) in inertial
reference systems.
General relativity studies
macroscopic bodies moving with large
velocities in non-inertial frames of reference.
Quantum mechanics studies microscopic bodies
(microparticles) moving with large, but
nonrelativistic speeds. Mechanics consists of three sections - kinematics,
dynamics and statics.
Kinematics studies the types of motions.
Dynamics studies the causes that cause one or another
type of movement.
Statics studies the conditions of equilibrium of bodies. Basic concepts of mechanics
Movement - changing the position of bodies
relative to a friend.
Reference body - the body in relation to which
the position of other bodies is determined.
Reference system - system of Cartesian coordinates,
associated with the reference body and the device for
countdown.
A material point is a body whose shape and
whose dimensions in this problem can be
neglect.
A perfectly rigid body is a body whose deformations
which can be neglected in this problem.
1.2. Movement, speed, acceleration
To describe the movement of a material point meansknow its position relative to the chosen
reference system at any given time.
To solve this problem, you need to have a length standard
(for example, a ruler) and a device for measuring
time - hours.
Let's choose a body of reference and associate with it a rectangular
coordinate system. Translational motion of a rigid body
is called a movement in which any straight line,
carried out in the body remains parallel
to herself.
During translational movement, all points of the body
move the same way.
The movement of a body can be characterized by the movement
one point - by the movement of the center of mass of the body. moving
r - connects the moving
Radius vector
material point (M) with the center of coordinates and
specifies the position of this point in the coordinate system.
M
r
z
k
j
i
x
0
y
x
y Projecting the radius vector
r on the coordinate axis:
r rX i rÓ j rZ k
i, j, k
- orts of the X, Y, Z axes (unit direction vectors)
The modulus of the radius vector is: r r
r x y z
2
2
2rX x
r
rZz
are projections of the radius vector
on the respective axes.
X, Y, Z are called Cartesian coordinates
material point.
r A line is called a trajectory:
- which describes the end of the radius vector
material point during its movement;
- along which the body moves.
According to the type of trajectory of movement are divided into:
- rectilinear;
- curvilinear;
- around the circumference. The law of motion of a material point is called
an equation expressing the dependence of its radius vector on time:
r r t
The scalar form of the law of motion is called
kinematic equations of motion:
xf(t)
f(t)
z f (t)
Eliminating the parameter from this system of equations
time t , we get the trajectory equation: Y \u003d f (X) For finite time intervals ∆t: t = t2 – t1
Displacement vector
connects the initial
r
and the end point of the movement traversed
body during the time t = t2 – t1.
1
r1
0
x
S12
r
r2
2
y r r2 r1
- increment (change)
radius is a vector.
r
Displacement vector modulus
called
movement.
Path - the distance (S12) traveled along the path.
Displacement and path are scalar quantities and
positive.
For finite time intervals ∆t, the displacement is not
equal to the distance travelled:
r S For an infinitely small time interval dt:
dr
dr
dS
- elementary displacement vector;
- elementary movement;
- the elementary way.
For infinitesimal time intervals
elementary displacement is equal to elementary
paths:
dr dr dS 12
1
r
dr
2
r
r S
1
r
2
dr dS The displacement vector is obtained by summing
r2
vectors of elementary displacements:
r dr
r1
We get the displacement by summing
elementary movements:
r r dr
The path is obtained by integration (summation)
elementary paths or equivalent modules
elementary movements:
S12dS
dr 12
1
r
dr
2
r
r S
1
r
2
dr dS Speed
is equal to the movement made
material point per unit of time;
- characterizes the speed of change
spatial position of the material
points;
- measured in m/s;
- Distinguish between average and instantaneous. The vector of the average speed for a period of time t:
- defined as
r
V
t
- directed along the displacement vector
r
.
V1
2
1
x
0
r
V2
y The mean velocity modulus is defined as
S
V
t
V1
S
2
1
x
0
r
V2
y When the body moves, the average speed changes
direction and magnitude. The instantaneous speed is equal to the limit to which
tends to the average velocity vector at
unlimited decreasing time interval
to zero (t0).
r
dr
Vlim
Δt 0 t
dt
dr
V
dt
The instantaneous speed is equal to the first derivative of
radius vector in time. v
Instantaneous velocity vector
sent to
vector dr , i.e. tangential to the trajectory.
V1
2
1
x
0
r
V2
y
The module of instantaneous speed is equal to the first
derivative of the path with respect to time:
d r dS
VV
dt
dt Velocity projections on the coordinate axes are
the first derivative of the corresponding
time coordinates:
dx
vx
dt
dy
vy
dt
dz
vz
dt Instantaneous velocity vector
through projections of velocity vx,
How:
v and its module V
vy, vz are written
v vx i vy j vzk
v
v vv
2
x
2
y
2
z In the process of moving a material point, the module and
direction of its velocity in general
change.
V1
1
2
V2 Acceleration
- equal to the change in speed per unit of time;
- characterizes the rate of change of speed with
the passage of time;
- measured in m/s2;
- is a vector quantity;
- Distinguish between average and instantaneous. V1
1
V2
x
0
V
2
V2
y The vector of average acceleration over time interval t
defined as
Where
V V2 V1
V
a
t
,
– increment (change) of speed over time t.
Mean vector
acceleration
vector V
.
a
sent to The instantaneous acceleration is equal to the limit to which
tends to average acceleration at unbounded
time interval decreasing to zero (t 0).
∆VdV
alim
Δt 0 Δt
dt
dV
a
dt
d r
V
dt
d r
a 2
dt
2
The instantaneous acceleration is:
- the first derivative of the instantaneous speed with respect to
time;
- the second derivative of the radius vector with respect to
time. Instantaneous acceleration vector with respect to
instantaneous velocity vector can take any
position at an angle α.
v
v
a
a If the angle is acute, then the motion of the material
points will be accelerated.
In the limit, the acute angle is zero. In this case
the movement is uniformly accelerated.
A
V
If the angle is obtuse, then the movement of the point will be
slow.
In the limit, the obtuse angle is 180 O. In this case
movement will be equally slow.
a
V Projections of the acceleration vector on the coordinate axes
are equal to the first derivatives of
corresponding velocity projections on the same
axes:
2
dVx dx
ax
2
dt dt
d2y
ay
2
dt dt
dVy
2
dVzdz
az
2
dt dt Instantaneous acceleration vector a and its modulus a
can be written in terms of projections as
a a xi a y j a zk
a a a a
2
x
2
y
2
z
1.3. Inverse problem of kinematics
Within the framework of kinematics, two main tasks are solved:direct and reverse.
When solving the direct problem according to the known law
movements
r r t
at any given time there are all other
kinematic characteristics of a material point:
path, movement, speed, acceleration. When solving the inverse problem from the known
acceleration versus time
a a t
find speed and position at any given time
material point on the trajectory.
To solve the inverse problem, one needs to set
some initial time tО
initial conditions:
- radius vector r0 ;
- point speed
v0
.From the definition of acceleration we have
dV a dt
Let's integrate
v(t)
v0
t
d V a dt
t0
VVO
t
a dt
t0 Finally, we get the speed by solving
given expression.
t
V VO a dt
(1)
t0
From the definition of speed it follows that the elementary
displacement is
d r V dt Substitute here the expression for the speed and
Let's integrate the resulting equation:
t
d r t VO t a dt
0
0
r0
r(t)
t
dt
Finally, for the radius vector we have the expression:
t
r rO
t0
t
VO a dt dt
t0 Then
Special cases
Uniform rectilinear motion
(acceleration a = 0 and t0 = 0).
r (t) r0 V0dt r0 V0t
t
t0
Let's move from the vector form of writing equations to
scalar:
x x 0 V0x t
s Vt Equal-variable rectilinear motion
= const and t = 0).
(acceleration a
0
Then
t
t
r r0 V0 a dt dt r0 V0 a t dt
0
0
0
t
2
at
r r0 V0 t
2The resulting expression, projected onto the x-axis,
looks like:
aXt
x x 0 VOX t
2
2
2
at
SVOt
2
1.4. Tangential and normal acceleration
Let the material point move alongcurvilinear trajectory, having different
speed at different points of the trajectory.
Curvilinear speed can
change both in magnitude and in direction.
These changes can be evaluated separately. a
Acceleration vector
can be split into two
directions:
- tangent to the trajectory;
- perpendicular to it (along the radius to the center
circles).
The components for these directions are called
and normal
tangential acceleration
a
accelerations a n .
a at an Tangential acceleration:
- characterizes the change in speed modulo;
- directed tangentially to the trajectory.
The module of tangential acceleration is equal to the module
the first derivative of speed with respect to time.
dV
a
dt Normal acceleration
- characterizes the change in speed according to
direction;
- directed perpendicular to the speed along
radius to the center of curvature of the path.
The modulus of normal acceleration is
2
V
an
R
R is the radius of curvature at a given point of the trajectory. Full acceleration of a material point.
a at an
Full acceleration module:
a
a
a a
2
τ
2
n
2
dV2
V 2
) (
dt
R Special cases of motions
1. a = 0,
an = 0
- uniform rectilinear movement;
2. a = const, a n = 0
- uniform rectilinear motion;
3. a = 0, a n = const
- uniform movement in a circle;
4. a = 0, a n = f(t)
- uniform curvilinear motion.
"Movement" - Graph coordinates. The displacement is determined by the area of the figure. According to the graphs, determine the coordinate of the body at time 2 s. Uniform rectilinear motion ... ... any equal ... Movement. Coordinate equation. Graphical representation displacement, speed and acceleration in uniform rectilinear motion.
"Moving Grade 9" - A Tricky Problem! What were tire tracks on the road? Attention!... Path -. LN Tolstoy proposes a task: Trajectory -. Fun challenge: Ivanov, why are you late for work today? Trajectory length. The length of the running track at the stadium is 400m. Then to the third, and again not there. Move. - Directed segment connecting the initial and final position of the body.
"Uniform movement" - Uniform movement. Wolf winner. The train was moving steadily. Tractor. Speed. Graph slope. Schedule. The speed of some objects. dependency graph. Path and movement. The equation of motion.
"Speed of uniform motion" - Speed has a direction. Questionnaire. Uniform speed. The numerical value of the speed. We learn to solve problems. Plotting speed versus time. Describe the speed of uniform motion. Movement. Write down the answers to the questions. Read two poems. Building a graph. Physical quantity.
"Speed time distance" - The result of the lesson. A butterfly flies 3000 km in 30 hours. Did you like the lesson? Without an account, the letter will not find the addressee, And the guys will not be able to play hide and seek. Reminders for the lesson. A cheetah has escaped from the zoo. The spider ran 60 cm in 2 s. How fast did the cheetah run? Working with a data table. Everyone in our city is friends.
"Problems for uniform motion" - Describe the movement of the body. Acceleration of a rectilinearly moving body. What bodies met. The speed of a body moving in a straight line. Write the nature of the movement of each body. Bar. Think of a solution plan. Body movement. Graphs. Average speed. write down general formula. Explain charts. Convert the resulting speed value to m/s.