Постановка задачи. Спроектировать нечеткую систему управления, имеющую статическую передаточную характеристику следующего вида:
Вариант 1. y = sin(x), x [-,].
Вариант 2. y = cos(x), x .
Вариант 3. y = (2) -1/2 exp(-x 2 /2), x [-3,3].
Вариант 4. y = (2/)arctg(x), x [-,].
Вариант 5. y = (1/)arcctg(x), x [-,].
Вариант 6. y = th(x) = (e x -e -x)/ (e x +e -x), x [-,].
Вариант 7. y = e -x sin(x), x [-,].
Вариант 8. y = e -x cos(x), x .
Подготовка к лабораторной работе.
Выбор подходящих опорных точек для последующей линейной аппроксимации. Рекомендуется построить отображаемую зависимость достаточно точно в укрупненном масштабе на миллиметровке и аппроксимировать ее отрезками прямых, пытаясь достичь разумного компромисса между минимальным числом отрезков и точностью аппроксимации. Полезным является также использование справочников по математике для поиска информации о математических правилах для выбора числа опорных точек, минимизирующих общую ошибку аппроксимации.
По полученной кусочно-линейной аппроксимирующей зависимости формируются функции принадлежности для входной и выходной переменных нечеткой системы.
Входным и выходным лингвистическим переменным и их термам присваиваются имена и аббревиатуры.
Формируется база правил аппроксимации.
Порядок выполнения работы:
Загрузить fuzzyTECH MP Explorer.
Для создания нового проекта выбрать строку «N ew» пункта главного меню «F ile». На вопрос программы «Generate system?» ответить утвердительно. В появившемся диалоговом окне «Generate system» задать следующие параметры нечеткой системы:
число входных лингвистических переменных в поле ввода «I nput LVs:» (в данной работе 1);
число выходных лингвистических переменных в поле ввода «O utput LVs:» (в данной работе 1);
число термов на входную лингвистическую переменную в поле ввода «Input t erms/LV:» (по результатам домашней подготовки);
число термов на выходную лингвистическую переменную в поле ввода «Output te rms/LV:» (по результатам домашней подготовки);
число блоков правил в поле ввода «R ule blocks:» (в данной работе 1 блок правил).
Зафиксировать результаты ввода нажатием кнопки «ОК». В результате в окне «Project Editor» формируется условное графическое изображение проектируемой нечеткой системы, а в окне лингвистических переменных «LV» список с предопределенными системными именами для входных и выходных переменных: in1, out1. На условном графическом изображении прямоугольник слева со схематическим рисунком функций принадлежности и именем «in1» представляет входную переменную, прямоугольник справа с рисунком дефазификации и именем «out1» отображает выходную переменную. В центре находится блок правил.
3. Для изменения имени лингвистической переменной и ввода ее термов необходимо выделить переменную из списка в окне «LV» (щелчком левой клавиши мышки на имени переменной) и нажать правую клавишу мышки для вызова всплывающего контекстного меню. В контекстном меню выбрать строку «A ttributes ...». В появившемся окне «Rename Variable» можно поменять имя переменной в поле «N ame:» и нажать на клавишу «Edit ...» для ввода термов для этой переменной.
В появившемся окне все термы в списке «T erm» также имеют предопределенные имена, которые можно поменять похожим образом: выделить из списка требуемый терм и вызвать из контекстного меню строку «A ttributes ...». Новое имя терма вводится в поле «T erm Name». Здесь же можно поменять форму нечеткого множества терма (группа радиопереключателей «S hape») и положение терма в списке (список «P osition»).
Перед определением функций принадлежности необходимо задать область определения лингвистической переменной. Для этого с помощью двойного щелчка левой кнопкой мыши на строке «Base_Variable» перейти в окно «Base Variable». Минимальное («Min :») и максимальное («M ax:») значение диапазона («Range») задаются в полях колонки «Shell Values». В этом окне можно также поменять подпись под графиком функций принадлежности в поле «B ase Variable Name».
Определение функции принадлежности может происходить двумя способами:
определить, какая из опорных точек функции принадлежности (прямоугольники на графике), имеющей тот же цвет, что и имя терма, отмечена «галочкой» внутри. Задать координаты этой опорной точки в полях ввода «x », «y »;
выделить опорную точку щелчком левой клавиши мышки. Нажать левую клавишу и, не отпуская, переместить прямоугольник опорной точки в требуемое место графика и там освободить клавишу.
4. После ввода всех лингвистических переменных и их термов необходимо создать базу правил нечеткой системы. Для этого следует дважды щелкнуть левой клавишей мышки на блоке правил условного графического изображения нечеткой системы. В результате откроется окно редактора правил «Spreadsheet Rule Editor», в котором перечислены все возможные комбинации правил. Необходимо отметить последовательно все правила, которые не нужны для работы системы, щелчками левой клавиши мышки на номерах соответствующих правил и удалить их разом нажатием клавиши «Del» с последующим утвердительным ответом на запрос системы о необходимости удаления. После этого закрыть окно редактора правил.
Открыть двойным щелчком мышки на прямоугольнике входной переменной условного графического изображения окно интерфейсных опций «Interface Options» и проверить, что установлен радиопереключатель «Fast Computation of MBF» группы «INPUT Fuzzification:» и в списке интерфейсных переменных «I nterface Variable:» указана правильная входная переменная. Аналогичным образом открыть то же окно для выходной переменной и проверить установку метода дефазификации «CoM» (Center of Maximum) и корректность выходной переменной в списке интерфейсных переменных.
Для получения передаточной характеристики нечеткой системы сформировать входное воздействие, линейно изменяющееся во всем допустимом диапазоне значений. Для этого выбрать строку «P attern Generator» пункта главного меню «D ebug». В появившемся окне «Pattern Generator» задать начальное значение в поле ввода «F rom:», конечное в поле ввода «То:» и шаг изменения в поле «S tep:». Для формирования файла входного воздействия нажать на кнопку «G enerate ...». Указать имя файла воздействия в окне сохранения файла «Generate Pattern To ...» и сохранить его нажатием кнопки «ОК». Закрыть окно «Pattern Generator» кнопкой «Close».
Вызвать функцию «F ile Recorder» из меню «D ebug». В окне «Read File Control Information From ...» указать в поле «Filen ame» имя файла со сформированным входным воздействием и нажать на кнопку «ОК». В результате откроются окна «Debug: File Recorder» и «File Control».
Сформировать окно для построения графика передаточной характеристики. Для этого вызвать функцию «Time P lot ...» из меню «A nalyzer». Задать конфигурацию графического вывода в окне «Time Plot Configuration» следующим образом:
в списке «L Vs:» выделить щелчком левой клавиши мыши выходную переменную;
переместить эту переменную в окно «P lot Items:» нажатием на кнопку «> >»;
завершить ввод конфигурации нажатием кнопки «ОК».
После этого откроется окно для графика передаточной характеристики «Time Plot - 1». Разместить окна «Time Plot - 1» и «File Control» на экране так, чтобы они не перекрывали друг друга. Окно «Debug: File Recorder» при этом может быть перекрыто этими окнами.
Получить график передаточной характеристики, используя окно «File Control». Для управления процессом используются кнопки поля «Control», похожие на клавиши плейера, расположенные в следующем порядке слева направо:
пошаговая перемотка вперед к последней точке;
автоматическая перемотка вперед к последней точке;
переход к последней точке входного воздействия.
переход к первой точке входного воздействия;
автоматическая перемотка назад к первой точке;
пошаговая перемотка назад к первой точке;
Для получения графика нажать кнопку автоматической перемотки вперед.
После зарисовки графика полученной передаточной характеристики закрыть окно «Time Plot - 1», перейти опять к первой точке входного воздействия и перемотать входное воздействие в пошаговом режиме, фиксируя вход («I nputs:») и выход («O utputs:») системы в окне «Debug: File Recorder». Эти данные будут использоваться для оценки точности аппроксимации передаточной характеристики. Закрыть окно «Debug: File Recorder», перейти опять к первой точке входного воздействия и открыть окно с функциями принадлежности выходной переменной, дважды щелкнув левой клавишей мыши на имени переменной в окне «LV». Изучить и зарисовать процесс дефазификации по методу «CoM» в пошаговом режиме.
Изменить установку метода дефазификации с «CoM» на «МоМ» (Mean of Maximum). Для этого необходимо перейти в окно «Project Editor» либо щелкнув на нем левой клавишей мыши, либо выбрав его из списка окон в меню «W indow» и открыть двойным щелчком мышки на прямоугольнике выходной переменной условного графического изображения окно интерфейсных опций «Interface Options», чтобы установить радиопереключатель «MoM» группы «OUTPUT Defuzzification:». После этого следует повторить вышеописанную процедуру получения передаточной характеристики для нового метода дефазификации.
Закрыть все открытые окна и завершить работу программы (строка «Ex it» пункта главного меню «F ile»).
Лекция № 6. ПРОЕКТИРОВАНИЕ НЕЧЕТКИХ АЛГОРИТМОВ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
Общие принципы построения интеллектуальных систем управления на основе нечеткой логики
Как уже отмечалось выше, применение нечеткой логики обеспечивает принципиально новый подход к проектированию систем управления, "прорыв" в новые информационные технологии, гарантирует возможность решения широкого круга проблем, в которых данные, цели и ограничения являются слишком сложными или плохо определенными и в силу этого не поддаются точному математическому описанию.
Возможны различные ситуации, в которых могут использоваться нечеткие модели динамических систем:
Когда имеется некоторое лингвистическое описание, которое отражает качественное понимание (представление) процесса и позволяет непосредственно построить множество нечетких логических правил;
Имеются известные уравнения, которые (хотя бы грубо) описывают поведение управляемого процесса, но параметры этих уравнений не могут быть точно идентифицированы;
Известные уравнения, описывающие процесс, являются слишком сложными, но они могут быть интерпретированы нечетким образом для построения лингвистической модели;
С помощью входных/выходных данных оцениваются нечеткие логические правила поведения системы.
Первые результаты практического применения алгоритмов нечеткой логики к управлению реальными техническими объектами были опубликованы в 1974 г. в работах профессора Лондонского Королевского колледжа Э.Х. Мамдани, посвященных проблеме регулирования парогенератора для электростанции. В этих работах была предложена ставшая сегодня классической структурная схема системы нечеткого управления (рис. 3.1).
Под нечетким управлением (Fuzzy Control) в данном, случае понимается стратегия управления, основанная на эмпирически приобретенных знаниях относительно функционирования объекта (процесса), представленных в лингвистической форме в виде некоторой совокупности правил.
Рис. 5.1. Структурная схема системы нечеткого управления
На рис. 3.1 ДФ - динамический фильтр, выделяющий, помимо сигналов ошибок управления x 1 =r 1 -y 1 и х 3 =r 2 -у 2 , производные от этих сигналов и ;
РНЛ - регулятор на основе нечеткой логики ("нечеткий регулятор”, включающий в себя базу знаний (конкретнее - базу правил) и механизм логического вывода;
соответственно векторы задающих воздействий (уставок), входов и выходов РНЛ, а также выходов объекта управления (т.е. парогенератора); т - операция транспонирования вектора.
В качестве входов и выходов РНЛ выступают:
Отклонение давления в паровом котле (y 1) по отношению к и требуемому (номинальному) значению (r 1);
Скорость изменения Р Е;
Отклонение скорости изменения давления (у 2) по отношению к его заданному значению (r 2);
Скорость изменения SE;
u 1 =H c – изменение степени подогрева пара;
U 2 =: Тс - изменение положения дросселя.
Мамдани предложил рассматривать эти величины как лингвистические переменные, каждая из которых может принимать одно из следующих значений из множества
L= {NB,NM,NS,NO,PO,PS,PM,PB}.
Здесь 1-я буква в обозначении указывает знак числовой переменной и соответствует английскому слову Negative ("отрицательное") или Positive ("положительное"), 2-я буква говорит об абсолютном значении переменной: Big ("большое"), Middle ("среднее"), Small ("малое") или О ("близкое к нулю"). Например, символ NS означает "отрицательное малое".
В процессе работы ИСУ в каждый момент времени используется один из двух нечетких алгоритмов: по первому из них осуществляется регулирование давления в котле путем изменения подогрева пара Н c , по второму поддерживается требуемая скорость изменения давления с помощью изменения положения регулирующего дросселя Т с. Каждый из алгоритмов состоит из ряда правил – высказываний, записанных на естественном языке, типа:
"Если отклонение давления в котле большое, отрицательного знака и если это отклонение не убывает с большой или средней по величине скоростью, то степень подогрева пара необходимо сильно увеличить".
"Если скорость изменения давления чуть ниже нормы и в то же время эта скорость резко растет, то следует изменить положение дросселя на положительную, достаточно малую, величину".
Используя введенные выше обозначения, можно переписать эти правила в следующем виде:
"ЕСЛИ (P E =NB И C PE =HE (NB ИЛИ NM), ТО Н С =РВ";
"ЕСЛИ (S E =NO И C SE =PB), TO T C =PS".
Реализация предложенных алгоритмов нечеткого управления при этом принципиально отличается от классических ("жестких") алгоритмов, построенных на основе концепции обратной связи (Feed-back Control) и, по существу, просто воспроизводящих некоторую заданную функциональную зависимость или дифференциальное уравнение.
Нечеткий регулятор берет на себя те функции, которые обычно выполняются опытным и умелым обслуживающим персоналом. Эти функции связаны с качественной оценкой поведения системы, анализом текущей меняющейся ситуации и выбором наиболее подходящего для данной ситуации способа управления объектом. Данная концепция управления получила название опережающего (или упреждающего) управления (Feed-Forward Control).
Используя образное сравнение, можно сказать, что примерно так действует опытный теннисист, каждый раз варьируя свой удар, чтобы мяч летел по определенной, выбранной им траектории, тогда как теннисный автомат работает по жестко заданной программе, подавая мяч всегда в одну и ту же точку, по одной и той же траектории.
Блок - схема нечеткого регулятора в общем случае принимает вид, изображенный на рис. 3.2.
Как видно из данной схемы, формирование управляющих воздействий u 1 ,u 2 ,...,u m включает в себя следующие этапы:
а) получение отклонений управляемых координат и скоростей их изменения – х 1 ,x 2 ,...,х n ;
б) "фаззификация" этих данных, т.е. преобразование полученных значений к нечеткому виду, в форме лингвистических переменных;
в) определение нечетких (качественных) значений выходных переменных u 1 ,u 2 ,...,u m (в виде функций их принадлежности соответствующим нечетким подмножествам) на основе заранее формулированных правил логического вывода, записанных в базе правил;
г) "дефаззификация", т.е. вычисление реальных числовых значений выходов u 1 ,u 2 ,...,u m , используемых для управления объектом.

Рис. 3.2. Блок-схема нечеткого регулятора
Помимо представленного на рис. 3.1 варианта "чистого" использования нечеткого управления, существуют и другие варианты построения ИСУ с нечеткими регуляторами. Так, в классической теории регулирования широкое распространение получило использование ПИД - регулятора, выходной сигнал которого вычисляется по формуле
 (3.1)
(3.1)
где параметры К п, К и и К д характеризуют удельный вес соответственно пропорциональной, интегральной и дифференциальной составляющей и, должны выбираться исходя из заданных показателей качества регулирования (время регулирования, перерегулирование, затухание переходных процессов).
Возможное использование нечеткого регулятора (НР) для автоматической настройки (адаптации) указанных параметров ПИД - регулятора показано на рис. 3.3,а. Другие варианты применения HP – формирование уставок обычных регуляторов (рис. 3.3,6); подключение параллельно ПИД - регулятору (рис. 3.3, в); управление с предварительной оценкой характеристик сигналов (ОХС), получаемых с датчиков, на основе интерпретации их значимости, выделения обобщенных показателей качества и т. п. с последующей обработкой с помощью алгоритмов нечеткой логики (рис. 3.3,г).

Рис. 3.3. Структуры ИСУ с нечеткими регуляторами
В качестве предпосылок к применению нечетких регуляторов обычно называются:
Большое число входных параметров, подлежащих анализу (оценке);
Большое число управляющих воздействий (многомерность);
Сильные возмущения;
Нелинейности;
Неточности математических моделей программы регулирования;
Возможность использования технических знаний "know - how".
Подводя итог сказанному, отметим еще раз те области применения, в которых использование нечетких регуляторов оказывается более эффективным по сравнению с традиционными алгоритмами управления. Это:
1) приложения, которые пока были не связаны с автоматизацией, требующие применения "know - how", например, пивоварение (где можно воспользоваться знаниями экспертов с целью повышения качества продукции), подъемные краны (для повышения производительности рабочего персонала) и т. п.;
2) приложения, в которых математические методы не работоспособны. Это очень сложные процессы, не поддающиеся математическому описанию, для управления которыми можно использовать, наряду с эмпирическими знаниями, также полученную измерительную информацию (например, о ходе химических процессов);
3) приложения, в которых стандартные регуляторы достаточно хорошо работают; однако управление на основе нечеткой логики предлагает в данном случае альтернативный способ решения задач регулирования, возможность работы с лингвистическими переменными, более широкие возможности для оптимизации.
Нечеткие системы (независимо от того, являются ли они нечеткими моделями или нечеткими контроллерами) (рис. 6) включают два главных компонента:
· Базу знаний (БЗ), в которой хранятся доступные или приобретенные знания о задаче, требующей решения, в форме нечетких правил;
· Механизм инференции, использующий методы нечетких рассуждений, базирующиеся на базе правил и входных сигналах, для получения выходного сигнала системы.
Оба этих компонента должны быть спроектированы так, чтобы построить систему для конкретного приложения:
· БЗ формируют из знаний экспертов или путем обучения с помощью машинных методов;
· Механизм инференции строят путем выбора нечетких операторов для каждого компонента (конъюнкция, импликация, дефаззификация и т.п.).
В ряде случаев операторы также параметризуются и могут быть настроены автоматическими методами.
Рис. 7
Проектирование БЗ затрагивает две подзадачи:
1. Определение базы данных (БД):
· Универсум для переменных;
· Масштабирующие коэффициенты или функции;
· Гранулированность (число лингвистических терм) для каждой переменной;
· Функции принадлежности, описывающие термы.
2. Составление базы правил (БП): формулировка базовых правил.
Как уже отмечено, существуют два различных метода для проектирования базы знаний (БЗ): информация от экспертов и с помощью машинных методов обучения на основе численной информации, полученной с помощью нечеткого моделирования или путем симуляции проектируемой системы управления.
Классификация генетических нечетких систем
С точки зрения оптимизации, чтобы найти соответствующую нечеткую систему, надо ее представить как эквивалентную параметрическую структуру и затем определить значения параметров, обеспечивающих оптимум для конкретной функции приспособленности. Поэтому первый шаг в проектировании ГНЛС решить вопрос о том, какая часть нечеткой системы подлежит оптимизации путем кодирования ее параметров в хромосомы. В этом разделе мы представим классификацию ГНЛС, соответствующую различным частям нечеткой системы, кодируемым с помощью генетической модели.
Обычно методы проектирования ГНЛС разделяют на два процесса, настройка (т.е. адаптация) и обучение . При этом будем исходить из факта, существует или нет исходная БЗ, включая БД и БП. Тогда в рамках ГНЛС мы вводим следующее деление.
· Генетическая настройка. Если существует БЗ, мы применяем процесс генетической настройки для улучшения свойств нечеткой системы, но не изменяем БП. Т.е. мы настраиваем параметры НЛС с целью улучшения ее свойств, сохраняя неизменной БП.
· Генетическое обучение. Вторая возможность обучать компоненты БП, к которым можно отнести адаптацию механизма инференции. Т.е. мы затрагиваем обучение компонентов БП, наряду с другими компонентами НЛС.
1) Генетическая настройка базы данных. Осуществляется путем определения предварительно вида и параметров масштабирующих функций входа и выхода, а также функций принадлежности, и затем настройки этих параметров и тем самым изменения формы масштабирующих функций и функций принадлежности с помощью ГА (рис. 8).
2) Генетическое обучение базы правил . Генетическое обучение БП предполагает предопределенное множество функций принадлежности в БД, к которым правила обращается посредством лингвистических терм.
Когда рассматривается задача обучения базы правил, открывается широкий диапазон возможностей. Имеется три главных подхода: питтсбургский, мичиганский и итеративный методы обучения. Питтсбургский и мичиганский подходы являются наиболее распространенными методами для обучения правил, разработанные в области ГА. Первый из них характеризуется представлением всего набора (совокупности) правил как генетического кода (хромосомы), «хромосома=набор правил», сохраняя неизменной популяцию кандидатов на роль правил и, используя селекцию, и генетические операторы для создания новых поколений наборов правил. Мичиганский подход рассматривает другую модель, в которой члены популяции являются отдельными правилами, «хромосома=правило» и набор правил представляется всей популяцией. В третьем случае, итеративном методе с помощью хромосом кодируют отдельные правила, и новое правило настраивается и добавляется в набор правил, итеративным способом.
Рассмотрены вопросы проектирования нечетких систем в пакете Fuzzy Logic Toolbox вычислительной среды MATLAB Даны необходимые сведения в области теории нечетких множеств и нечеткой логики. Приведен теоретический материал по проектированию нечетких систем. Изложены теория нечеткой идентификации, методы нечеткой кластеризации и их применение для экстракции нечетких правил, а также метод принятия решений в нечетких условиях на основе слияния целей и ограничений. Рассмотрены авторские расширения пакета для проектирования нечетких классификаторов, построения иерархических нечетких систем, обучения нечетких баз знаний типа Мамдани, а также для логического вывода при нечетких исходных данных. Книга может использоваться как учебное пособие к университетским курсам по интеллектуальным системам, искусственному интеллекту, теории принятия решений и методам идентификации.
Для проектировщиков систем, будет полезна научным сотрудникам, аспирантам и студентам старших курсов, интересующимся применением теории нечетких множеств в управлении, идентификации, обработке сигналов, а также разработчикам интеллектуальных систем поддержки принятия решений в медицине, биологии, социологии, экономике, политике, спорте и в других областях.
Предисловие
Глава 1. Краткий курс теории нечетких множеств
1.1. Исторический экскурс
1.2. Нечеткие множества
1.2.1. Основные термины и определения
1.2.2. Свойства нечетких множеств
1.2.3. Операции над нечеткими множествами
1.2.4. Функции принадлежности
1.3. Нечеткая арифметика
1.4. Нечеткие отношения
1.5. Нечеткая логика
1.5.1. Лингвистические переменные
1.5.2. Нечеткая истинность
1.5.3. Нечеткие логические операции
1.6. Нечеткий логический вывод
1.6.1. Логический вывод
1.6.2. Основы нечеткого логического вывода
1.6.3. Нечеткие базы знаний
1.6.4. Композиционное правило нечеткого вывода Заде
1.6.5. Нечеткий логический вывод Мамдани
1.6.6. Нечеткий логический вывод Сугено
1.6.7. Нечеткий логический вывод по синглтонной базе знаний
1.6.8. Нечеткий логический вывод для задач классификации
1.6.9. Иерархические системы нечеткого логического вывода
1.6.10. Нейро-нечеткие сети
Глава 2. Теория проектирование нечетких систем
2.1. Идентификация нелинейных зависимостей нечеткими базами знаний
2.1.1. Настройка нечеткой базы знаний Мамдани
2.1.2. Настройка нечеткой базы знаний Сугено
2.1.3. Настройка нечеткой базы знаний для задач классификации
2.2. Нечеткая кластеризация
2.2.1. Введение в кластеризацию
2.2.2. Кластеризация алгоритмами с-средних
2.2.2.1. Четкая кластеризация алгоритмом с-средних
2.2.2.2. Базовый алгоритм нечетких с-средних
2.2.2.3. Обобщения алгоритма нечетких с-средних
2.2.3. Кластеризация горным алгоритмом
2.2.4. Синтез нечетких правил по результатам кластеризации
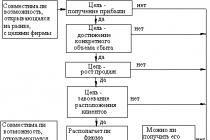
2.3. Принятие решений в нечетких условиях по схеме Беллмана-Заде
2.3.1. Нечеткие цели, ограничения и решения
2.3.2. Нечеткий многокритериальный анализ вариантов
2.3.3. Нечеткий многокритериальный анализ бренд-проектов
2.3.4. «Что - если». Анализ вариантов
Глава 3. Пакет Fuzzy Logic Toolbox
3.1. Структура и возможности пакета
3.2. Быстрый старт
3.2.1. Разработка нечеткой системы типа Мамдани
3.2.2. Разработка нечеткой системы типа Сугено на основе экспертных знаний
3.2.3. Экстракция из данных нечеткой системы Сугено с помощью ANFIS-редактора
3.2.4. Экстракция нечеткой системы в режиме командной строки
3.3. GUI-модули
3.3.1. Fuzzy Inference System Editor
3.3.1.1. Меню File
3.3.1.2. Меню Edit
3.3.1.3. Меню View
3.3.1.4. Меню And method, Or method, Implication и Aggregation
3.3.1.5. Меню Defuzzification
3.3.2. Membership Function Editor
3.3.3. Rule Editor
3.3.3.1. Меню Edit
3.3.3.2. Меню Options
3.3.4. ANFIS Editor
3.3.4.1. Меню Edit
3.3.4.2. Область визуализации
3.3.4.2. Область свойств ANFIS
3.3.4.3. Область загрузки данных
3.3.4.4. Область генерирования исходной системы нечеткого вывода
3.3.4.5. Области обучения, тестирования и вывода текущей информации
3.3.5. Rule Viewer
3.3.6. Surface Viewer
3.3.6.1. Меню Options
3.3.6.2. Меню координатных осей
3.3.6.3. Поля ввода информации
3.3.7. Findcluster
3.3.7.1. Область визуализации
3.3.7.2. Область загрузки данных
3.3.7.3. Область кластеризации
3.4. Демо-примеры
3.4.1. Запуск основных демо-примеров
3.4.2. Предсказание топливной эффективности автомобиля
3.4.3. Нелинейное шумоподавление
3.4.4. Предсказание временного ряда
3.4.5. Прогнозирование количества автомобильных поездок
3.4.6. Идентификация процесса нагрева воздуха в фене
3.4.7. Жонглирование теннисным шариком
3.4.8. Удержание шарика на коромысле
3.4.9. Парковка грузовика
3.4.10. Регулятор воды в баке
3.4.11. Управление душем
3.4.12. Удержание перевернутого маятника на тележке
3.4.13. Управление рукой робота-манипулятора
3.4.14. Кластеризация алгоритмом нечетких с-средних
3.4.15. Кластеризация ирисов
3.4.16. Методы дефаззификации
3.4.17. Галерея функций принадлежности
3.4.18. Калькулятор чаевых
3.5. Справочник функций пакета Fuzzy Logic Toolbox
3.6. Структуры данных
3.6.1. Структура данных системы нечеткого вывода
3.6.2. Структура файла системы нечеткого вывода
3.6.3. Структуры данных для ANFIS-обучения и кластеризации
3.7. Взаимодействие с другими пакетами
3.7.1. Блоки для пакета Simulink
3.7.2. Си-код машины нечеткого логического вывода
Глава 4. Расширение пакета Fuzzy Logic Toolbox
4.1. Настройка нечетких моделей Мамдани средствами Optimization Toolbox
4.2. Экстракция нечетких моделей Мамдани через нечеткую кластеризацию
4.3. Проектирование нечетких классификаторов
4.4. Нечеткий вывод при нечетких исходных данных
4.5. Проектирование иерархических нечетких систем
4.5.1. Первый способ
4.5.2. Второй способ
Заключение
Литература
Приложение. Интернет-ресурсы по нечетким системам
Разработайте и моделируйте системы нечеткой логики
Fuzzy Logic Toolbox™ обеспечивает функции MATLAB ® , приложения и блок Simulink ® для анализа, разработки и симуляции систем на основе нечеткой логики. Руководства по продукту вы через шаги разработки нечетких систем вывода. Функции обеспечиваются для многих общепринятых методик, включая нечеткую кластеризацию и адаптивное нейронечеткое изучение.
Тулбокс позволяет вам поведения сложной системы модели, использующие простые логические правила, и затем реализуйте эти правила в нечеткой системе вывода. Можно использовать его в качестве автономного нечеткого механизма логического вывода. Также можно использовать нечеткие блоки вывода в Simulink и моделировать нечеткие системы во всесторонней модели целой динамической системы.
Начало работы
Изучите основы Fuzzy Logic Toolbox
Нечеткое системное моделирование вывода
Создайте нечеткие системы вывода и нечеткие деревья
Нечеткая системная настройка вывода
Настройте функции принадлежности и правила нечетких систем
Кластеризация данных
Найдите кластеры в данных о вводе/выводе с помощью нечетких c-средних-значений или отнимающей кластеризации